:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
:strip_icc():strip_exif()/u/141461/crop5e2b6cc42ec35_cropped.jpeg?f=community)
Ik had deze week een weekje vrij en heb erg veel gevlogen de afgelopen dagen. 
Om op jouw vraag aan noobgrinder in te gaan @ChojinZ, ik ben ook van de FlySKy i6 overgestapt naar een X7 en merkte inderdaad ook in de sims dat het allemaal wat soepeler loopt maar in RL is zit er wel een behoorlijk verschil in vind ik.
De X7 is een stuk gevoeliger, je bewegingen op de sticks komen dus directer binnen. Dit is zeker de eerste paar keer best even wennen. Waar ik met punchouts op de i6 gewoon recht omhoog ging had ik nu een kleine afwijking naar rechts. Eerst dacht ik dat er iets mis was met de tuning van de quad o.d. maar in black box zag ik dat het gewoon mijn stick is die ik ietsjes naar rechts beweeg op de yaw. Ik heb er inmiddels steeds minder last van in ieder geval.
Wat mij ook heel erg opviel is dat ik veel minder moeite heb om de throttle te doseren dus laag vliegen gaat me ineens een stuk beter af!
Ik heb op de Taranis zelf verder nog weinig veranderd qua instellingen. Eigenlijk heb ik alleen de channels toegevoegd die ik nodig heb en meer niet en dat werkt al prima en vond ik niet heel erg lastig om in te stellen.
De Lizard was trouwens ook binnen en daar heb ik van de week voor het eerst mee gevlogen alleen dat verliep niet bepaald vlekkeloos. De camera werd ineens heel erg donker toen ik op steeg waardoor ik eigenlijk niets meer zag en voor ik het wist was ik vrij hard tegen een boom aangevlogen. Ik merkte wel al dat ie echt verschrikkelijk snel is! Sneller dan mijn ZMR250. Maar goed, de crash had als gevolg dat de antenne guard gebroken is en de antenne van de VTX zelf is verbogen en hangt zo goed als los.
Nou had ik al begrepen dat de camera niet al te best was en die VTX met die antenne's zijn ook ruk dus maar direct een Runcam Micro met Eachine ATX03 besteld. Ik heb sinds kort zelf een 3d printer dus een mount voor de Runcam is zo geprint.
Maar goed, ook het onvermijdelijke met de ZMR250 is gisteren gebeurd.
Zoals ik hier al eerder had verteld was het frame al aardig gehavend en gisteren na een harde crash was er een arm gebroken en zitten er 2 scheurtjes in de bodem plaat. Hoe die crash precies gebeurde weet ik niet, hij viel ineens uit de lucht en in de logs zag ik dat er voldoende stroom was, geen fail safe actief werd en de motoren nog draaide totdat ie op de grond plofte. Is dit dan een ESC desync? Of kwam de batterij misschien los van de strap? Het gebeurde net na een flip en vloog met een 1800mah batterij welke altijd al redelijk losjes zat onder de strap door de wat ongunstige plaatsing op het frame. (GoPro zit dan in de weg). Ik zelf denk dus dat de batterij onder de strap vandaan is gekomen waardoor ik de controle verloor met de crash tot gevolg. De batterij is trouwens ook kapot gegaan maar dat is niet zo'n drama. Vond hem toch al te groot en te zwaar.
Maar nu zit ik dus te kijken voor een nieuw frame maar wil dan eigenlijk wel een hele nieuwe quad bouwen zodat ik ook de FC en RX kan vervangen. De Kakute is voor mij toch afgevallen omdat ik wisselende verhalen lees over slechte pads. Ik denk ook dat het niet optimaal is dat alle dikke stroomdraden naar de FC gaan ondanks dat de gyro softmounted is.
Ik lees best wat goede verhalen over de Matek F405-OSD BetaFlight STM32F405 Flight Controller + Matek FCHUB-6S Hub Power Distribution Board combinatie.
Softmount standoffs zitten er bij en de PDB en FC zitten verbonden met een ribbon kabel. Mocht dat niks zijn kan ik alles gewoon aansluiten zoals een normaal PDB en FC. Ook lijkt de PDB het erg goed te doen qua filtering zeker met een cap erbij. (Review, vanaf 9:30 een noise test).
Ik wil toch graag een wat groter frame omdat ik de batterij perse bovenop wil hebben. Ik lees overal dat dit beter is voor freestyle vliegen omdat het gewicht dan bovenop ligt maar vooral omdat ik nog niet zo'n ster ben in landen. (hoewel dat deze week al steeds beter gaat!)
(hoewel dat deze week al steeds beter gaat!)
Ik neig nu zelf naar de Realacc X5R of de GepRC GEP VX5. Die laatste is 2x zo duur maar lijk wel iets meer robuust. Echter als ik kijk naar hoe lang mijn ZMR250 het uitgehouden heeft waarvan ik het frame zelf verzwakt heb door schroefjes te moeten uitboren weet ik niet of het die 20 euro extra waard is. De GepRC is wel 12 gram lichter.
Mocht iemand nog tips hebben voor een frame waarbij de batterij bovenop ligt hoor ik het graag!
De ESC zullen de Racerstar Tattoo 30A worden en camera een Runcam Eagle 2. De VTX die ik nu heb, een Eachine TX526 ben ik zeer tevreden over en omdat ik toch altijd alleen vlieg vond ik het niet de moeite om voor een Tramp HV te gaan. De RX zal een FrSky XSR worden en die heeft verder weinig toelichting nodig want die zal iedereen inmiddels wel kennen.
Dan tot slot de motoren. Ik zat de twijfelen tussen de Emax RS2205 of de Racerstar BR2205 welke ik nu ook heb. Omdat ik eigenlijk gewoon tevreden ben met de Racerstar en het toch weer 20 euro scheelt denk dat ik toch voor die laatste ga. Totaal kom ik na aftrek van punten op Banggood net onder de 200e uit inclusief shipping en verzekering. Daar zit echter wel ook nog zo'n Realacc 3e hand bij. Dat ding wat ik nu heb word ik gek van en soldeer best veel.
Dan bestel ik op AliExpress nog wel een ZMR250 frame voor een paar euro zodat de oud gediende een mooie reserve quad wordt.

Om op jouw vraag aan noobgrinder in te gaan @ChojinZ, ik ben ook van de FlySKy i6 overgestapt naar een X7 en merkte inderdaad ook in de sims dat het allemaal wat soepeler loopt maar in RL is zit er wel een behoorlijk verschil in vind ik.
De X7 is een stuk gevoeliger, je bewegingen op de sticks komen dus directer binnen. Dit is zeker de eerste paar keer best even wennen. Waar ik met punchouts op de i6 gewoon recht omhoog ging had ik nu een kleine afwijking naar rechts. Eerst dacht ik dat er iets mis was met de tuning van de quad o.d. maar in black box zag ik dat het gewoon mijn stick is die ik ietsjes naar rechts beweeg op de yaw. Ik heb er inmiddels steeds minder last van in ieder geval.
Wat mij ook heel erg opviel is dat ik veel minder moeite heb om de throttle te doseren dus laag vliegen gaat me ineens een stuk beter af!
Ik heb op de Taranis zelf verder nog weinig veranderd qua instellingen. Eigenlijk heb ik alleen de channels toegevoegd die ik nodig heb en meer niet en dat werkt al prima en vond ik niet heel erg lastig om in te stellen.
De Lizard was trouwens ook binnen en daar heb ik van de week voor het eerst mee gevlogen alleen dat verliep niet bepaald vlekkeloos. De camera werd ineens heel erg donker toen ik op steeg waardoor ik eigenlijk niets meer zag en voor ik het wist was ik vrij hard tegen een boom aangevlogen. Ik merkte wel al dat ie echt verschrikkelijk snel is! Sneller dan mijn ZMR250. Maar goed, de crash had als gevolg dat de antenne guard gebroken is en de antenne van de VTX zelf is verbogen en hangt zo goed als los.
Nou had ik al begrepen dat de camera niet al te best was en die VTX met die antenne's zijn ook ruk dus maar direct een Runcam Micro met Eachine ATX03 besteld. Ik heb sinds kort zelf een 3d printer dus een mount voor de Runcam is zo geprint.
Maar goed, ook het onvermijdelijke met de ZMR250 is gisteren gebeurd.
Zoals ik hier al eerder had verteld was het frame al aardig gehavend en gisteren na een harde crash was er een arm gebroken en zitten er 2 scheurtjes in de bodem plaat. Hoe die crash precies gebeurde weet ik niet, hij viel ineens uit de lucht en in de logs zag ik dat er voldoende stroom was, geen fail safe actief werd en de motoren nog draaide totdat ie op de grond plofte. Is dit dan een ESC desync? Of kwam de batterij misschien los van de strap? Het gebeurde net na een flip en vloog met een 1800mah batterij welke altijd al redelijk losjes zat onder de strap door de wat ongunstige plaatsing op het frame. (GoPro zit dan in de weg). Ik zelf denk dus dat de batterij onder de strap vandaan is gekomen waardoor ik de controle verloor met de crash tot gevolg. De batterij is trouwens ook kapot gegaan maar dat is niet zo'n drama. Vond hem toch al te groot en te zwaar.
Maar nu zit ik dus te kijken voor een nieuw frame maar wil dan eigenlijk wel een hele nieuwe quad bouwen zodat ik ook de FC en RX kan vervangen. De Kakute is voor mij toch afgevallen omdat ik wisselende verhalen lees over slechte pads. Ik denk ook dat het niet optimaal is dat alle dikke stroomdraden naar de FC gaan ondanks dat de gyro softmounted is.
Ik lees best wat goede verhalen over de Matek F405-OSD BetaFlight STM32F405 Flight Controller + Matek FCHUB-6S Hub Power Distribution Board combinatie.
Softmount standoffs zitten er bij en de PDB en FC zitten verbonden met een ribbon kabel. Mocht dat niks zijn kan ik alles gewoon aansluiten zoals een normaal PDB en FC. Ook lijkt de PDB het erg goed te doen qua filtering zeker met een cap erbij. (Review, vanaf 9:30 een noise test).
Ik wil toch graag een wat groter frame omdat ik de batterij perse bovenop wil hebben. Ik lees overal dat dit beter is voor freestyle vliegen omdat het gewicht dan bovenop ligt maar vooral omdat ik nog niet zo'n ster ben in landen.
Ik neig nu zelf naar de Realacc X5R of de GepRC GEP VX5. Die laatste is 2x zo duur maar lijk wel iets meer robuust. Echter als ik kijk naar hoe lang mijn ZMR250 het uitgehouden heeft waarvan ik het frame zelf verzwakt heb door schroefjes te moeten uitboren weet ik niet of het die 20 euro extra waard is. De GepRC is wel 12 gram lichter.
Mocht iemand nog tips hebben voor een frame waarbij de batterij bovenop ligt hoor ik het graag!
De ESC zullen de Racerstar Tattoo 30A worden en camera een Runcam Eagle 2. De VTX die ik nu heb, een Eachine TX526 ben ik zeer tevreden over en omdat ik toch altijd alleen vlieg vond ik het niet de moeite om voor een Tramp HV te gaan. De RX zal een FrSky XSR worden en die heeft verder weinig toelichting nodig want die zal iedereen inmiddels wel kennen.
Dan tot slot de motoren. Ik zat de twijfelen tussen de Emax RS2205 of de Racerstar BR2205 welke ik nu ook heb. Omdat ik eigenlijk gewoon tevreden ben met de Racerstar en het toch weer 20 euro scheelt denk dat ik toch voor die laatste ga. Totaal kom ik na aftrek van punten op Banggood net onder de 200e uit inclusief shipping en verzekering. Daar zit echter wel ook nog zo'n Realacc 3e hand bij. Dat ding wat ik nu heb word ik gek van en soldeer best veel.
Dan bestel ik op AliExpress nog wel een ZMR250 frame voor een paar euro zodat de oud gediende een mooie reserve quad wordt.
Die heb ik van de week ook besteld. Ik heb een 500watt ATX voeding liggen welke ik om wil bouwen naar 'lab voeding' (onderdelen daarvoor komen zo binnen) die ik met deze lader wil gaan gebruiken. Mijn Accucel begint rare geluiden te maken dus voordat ie de geest geeft deze maar gekocht. Dan kan ik met de Accucel m'n 2S batterij van m'n goggle laden of de 3S van de Lizard totdat ie uiteindelijk de geest geeft.BoAC schreef op zaterdag 28 oktober 2017 @ 18:13:
[...]
Deze is nu in de aanbieding: https://m.banggood.com/IS...ce-Charger-p-1060646.html
Ik heb em ook besteld, want ik zat er al een tijdje op te letten
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 13-05 11:47
Prrrr bleep boem!
/u/446870/crop5db0017462e30.png?f=community)
Dat heb ik nog niet geprobeerd, na werk is het helaas al donker dus moet nog even wachten tot het weekend.ChojinZ schreef op donderdag 2 november 2017 @ 17:30:
[...]
En hoe vliegt het RL? Ook beter of merk je daar het verschil niet?
Synthpop muziek: https://soundcloud.com/boppeaux
- MsG
- Registratie: November 2007
- Laatst online: 00:32
Forumzwerver
@Radiance wat voor multi protocol module gebruik je? Ik zit ook nog weleens te denken aan zo'n upgrade om mijn mini quads ook te kunnen besturen op mijn i6. Overigens heb ik 0 problemen met failsafe op de i6, ik stel het meeste hiervan in in Betaflight zelf.
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
/u/36460/Pancrase_Hybrid_Wrestling_logo%252060x60.png?f=community)
Klinkt positief! Jij gebruikte toch ook een module voor Flysky ontvangers? Welke module is dat precies?Radiance schreef op vrijdag 3 november 2017 @ 10:11:
Ik had deze week een weekje vrij en heb erg veel gevlogen de afgelopen dagen.
Om op jouw vraag aan noobgrinder in te gaan @ChojinZ, ik ben ook van de FlySKy i6 overgestapt naar een X7 en merkte inderdaad ook in de sims dat het allemaal wat soepeler loopt maar in RL is zit er wel een behoorlijk verschil in vind ik.
De X7 is een stuk gevoeliger, je bewegingen op de sticks komen dus directer binnen. Dit is zeker de eerste paar keer best even wennen. Waar ik met punchouts op de i6 gewoon recht omhoog ging had ik nu een kleine afwijking naar rechts. Eerst dacht ik dat er iets mis was met de tuning van de quad o.d. maar in black box zag ik dat het gewoon mijn stick is die ik ietsjes naar rechts beweeg op de yaw. Ik heb er inmiddels steeds minder last van in ieder geval.
Ik was nog aan het twijfelen om een x7 te halen maar ik ben nu eigenlijk wel om...
Ik ben zelf overgestapt van Racestar naar Emax maar dat verschil merk je wel. Emax motoren zitten direct op de max terwijl mijn Racestars toch nog ff moesten opspinnen. Daarnaast zijn de Emax motoren een stuk smoother. Ik heb ze dan ook niet hoeven balancen. Wellicht een overweging waard. Zeker nu alle Emax motoren bij Banggood in de sale zijn!Radiance schreef op vrijdag 3 november 2017 @ 10:11:
Dan tot slot de motoren. Ik zat de twijfelen tussen de Emax RS2205 of de Racerstar BR2205 welke ik nu ook heb. Omdat ik eigenlijk gewoon tevreden ben met de Racerstar en het toch weer 20 euro scheelt denk dat ik toch voor die laatste ga. Totaal kom ik na aftrek van punten op Banggood net onder de 200e uit inclusief shipping en verzekering. Daar zit echter wel ook nog zo'n Realacc 3e hand bij. Dat ding wat ik nu heb word ik gek van en soldeer best veel.
[ Voor 30% gewijzigd door ChojinZ op 03-11-2017 13:29 ]
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Dat is de iRangeX IRX4. Ook de kleine quads doen het prima.MsG schreef op vrijdag 3 november 2017 @ 12:37:
@Radiance wat voor multi protocol module gebruik je? Ik zit ook nog weleens te denken aan zo'n upgrade om mijn mini quads ook te kunnen besturen op mijn i6. Overigens heb ik 0 problemen met failsafe op de i6, ik stel het meeste hiervan in in Betaflight zelf.
Ik weet niet hoe jij failsafe in Betaflight instelt met een i6AB maar deze heeft uit zichzelf geen functie dat ie actie onderneemt zodra het signaal wegvalt. Dit moet je op de transmitter doen, wat overigens dus niet out of the box lukte met de iRangeX. Die optie is er simpelweg niet.
Als ik met de i6AB en de i6 failsafe allemaal liet regelen door Betaflight bleven de motoren gewoon draaien als ik airmode geactiveerd had staan. Throttle gaat dan wel naar beneden maar dat heeft natuurlijk geen effect in airmode. Dat had ik toen opgelost door failsafe op 1 van de 2 podmeters te zetten en daar in Betaflight failsafe aan koppelen. Op de i6 fail safe instellingen gaf ik dan aan dat AUX 6 naar 0% moet bij signaal verlies.
Zie het stukje hierboven.ChojinZ schreef op vrijdag 3 november 2017 @ 13:25:
[...]
Klinkt positief! Jij gebruikte toch ook een module voor Flysky ontvangers? Welke module is dat precies?
Ik was nog aan het twijfelen om een x7 te halen maar ik ben nu eigenlijk wel om...
[...]
Ik ben zelf overgestapt van Racestar naar Emax maar dat verschil merk je wel. Emax motoren zitten direct op de max terwijl mijn Racestars toch nog ff moesten opspinnen. Daarnaast zijn de Emax motoren een stuk smoother. Ik heb ze dan ook niet hoeven balancen. Wellicht een overweging waard. Zeker nu alle Emax motoren bij Banggood in de sale zijn!
Ik zei de Emax niet op sale staan op Banggood? De Racerstar daarin tegen wel maar dat scheelt minder dan wat ik met punten aan korting krijg. Ik kies daarom ook niet voor de rode maar voor paarse die niet in de aanbieding zijn zodat ik gewoon m'n punten kan gebruiken.
Of bedoel jij de customized versie van Eachine? Je hebt me in ieder geval toch wel overtuigd dat ik beter die 2 tientjes extra kan uitgeven. Slecht eigenlijk hoe we elkaar hier zo beïnvloeden.
Ik ga vanavond nog wel even wat rond kijken en reviews lezen.
- MsG
- Registratie: November 2007
- Laatst online: 00:32
Forumzwerver
Hmm raar, ik heb in de zender enkel m'n endpoints aangepast voor een grotere ondergrens en in Betaflight ingesteld dat bijvoorbeeld vanaf 995 en lager het een ongeldige value is. Als mijn zender aan is zendt hij namelijk op die channel 1000 uit. Dus eigenlijk staat Betaflight in failsafe tènzij hij channel X op 1000 of hoger ziet. Valt dat weg, dan kickt hij in op failsafe. Zie hier: https://www.propwashed.com/ibus-betaflight-guide/ zie dat het inderdaad ook iets in de zender is, wellicht bedoelen we gewoon hetzelfde. Werkt hier in ieder geval perfect met I6 + IA6b en ook met X6b.Radiance schreef op vrijdag 3 november 2017 @ 16:22:
[...]
Dat is de iRangeX IRX4. Ook de kleine quads doen het prima.
Ik weet niet hoe jij failsafe in Betaflight instelt met een i6AB maar deze heeft uit zichzelf geen functie dat ie actie onderneemt zodra het signaal wegvalt. Dit moet je op de transmitter doen, wat overigens dus niet out of the box lukte met de iRangeX. Die optie is er simpelweg niet.
Als ik met de i6AB en de i6 failsafe allemaal liet regelen door Betaflight bleven de motoren gewoon draaien als ik airmode geactiveerd had staan. Throttle gaat dan wel naar beneden maar dat heeft natuurlijk geen effect in airmode. Dat had ik toen opgelost door failsafe op 1 van de 2 podmeters te zetten en daar in Betaflight failsafe aan koppelen. Op de i6 fail safe instellingen gaf ik dan aan dat AUX 6 naar 0% moet bij signaal verlies.
[...]
offtopic:
Is je site gehackt of gewoon permanent offline? Anders jammer van de uitgebreide Quanum Cyclops tutorial. Die mod moet ik nog toepassen namelijk
Is je site gehackt of gewoon permanent offline? Anders jammer van de uitgebreide Quanum Cyclops tutorial. Die mod moet ik nog toepassen namelijk
[ Voor 4% gewijzigd door MsG op 03-11-2017 16:31 ]
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Hmm zo heb ik het nooit geprobeerd maar de manier waarop ik het ingesteld had staan werkte ook prima omdat je nooit per ongeluk die pod meter helemaal dicht draait natuurlijk. Die had ik altijd helemaal open staan en tussen de 1000 en de 1100 ging ie pas in over op failsafe. Echter werkt jou trucje ook niet met de multi module omdat hij alle waardes bewaard. Als je de receiver uitzet blijven de waardes zoals ze stonden.
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Al mijn receivers werken op ibus. Word dan ook gewoon ondersteund? Ik lees veel over PPM maar dat wil ik niet meer.Radiance schreef op vrijdag 3 november 2017 @ 16:22:
[...]
Dat is de iRangeX IRX4. Ook de kleine quads doen het prima.
My bad. Ik bedoelde 'welke multi protocol module gebruik je in de TX'. Maar die vraag is al beantwoord.Radiance schreef op vrijdag 3 november 2017 @ 16:22:
[...]
Zie het stukje hierboven.
Ik ook niet meer...Radiance schreef op vrijdag 3 november 2017 @ 16:22:
[...]
Ik zei de Emax niet op sale staan op Banggood? De Racerstar daarin tegen wel maar dat scheelt minder dan wat ik met punten aan korting krijg. Ik kies daarom ook niet voor de rode maar voor paarse die niet in de aanbieding zijn zodat ik gewoon m'n punten kan gebruiken.
Of bedoel jij de customized versie van [url=https://www.banggood.com/4X-Eachine-V-tail-210-FPV-Drone-Spare-Part-Customized-Version-Emax-RS2205-2300KV-Brushless-Motor-
hehe, irritant he! Jij helpt me aan een nieuwe TX, ik jou aan nieuwe motoren. Dit topic is niet goed voor je portemonnee...Radiance schreef op vrijdag 3 november 2017 @ 16:22:
[...] Je hebt me in ieder geval toch wel overtuigd dat ik beter die 2 tientjes extra kan uitgeven. Slecht eigenlijk hoe we elkaar hier zo beïnvloeden.
Ik ga vanavond nog wel even wat rond kijken en reviews lezen.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
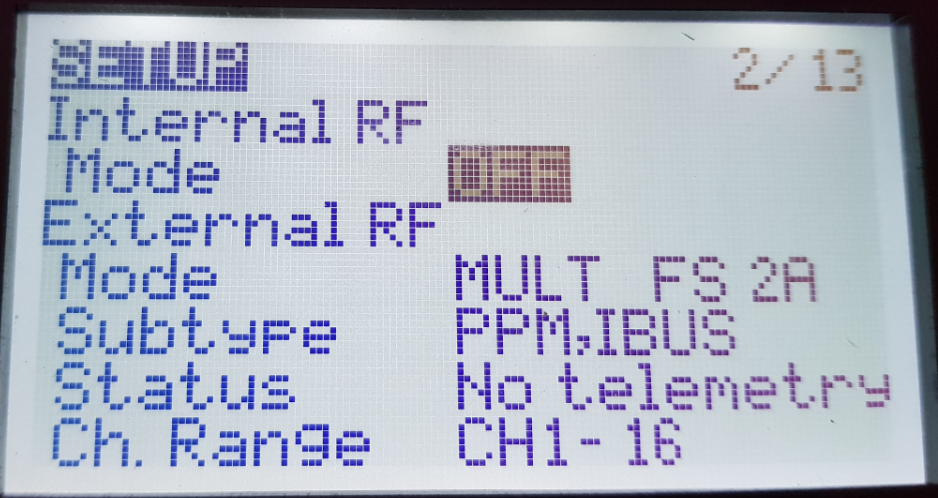
Yes ik vlieg zelf ook met ibus, dat deed ik al met de F6 en heb niets veranderd aan de setup. Ik maak zo als ik thuis ben wel even een foto van het menu maar het protocol heet FS A2 dacht ik.ChojinZ schreef op vrijdag 3 november 2017 @ 18:00:
[...]
Al mijn receivers werken op ibus. Word dan ook gewoon ondersteund? Ik lees veel over PPM maar dat wil ik niet meer.
[...]
My bad. Ik bedoelde 'welke multi protocol module gebruik je in de TX'. Maar die vraag is al beantwoord.
[...]
Ik ook niet meer...2 dagen geleden nog een groot banner gezien met allerlei Emax motoren die in de aanbieding waren. Maar dat is banggood: Ineens weer weg....
[...]
hehe, irritant he! Jij helpt me aan een nieuwe TX, ik jou aan nieuwe motoren. Dit topic is niet goed voor je portemonnee...
Kijk anders even op de GitHub van de firmware.
https://github.com/pascal...ule/blob/master/README.md
De firmware was er al voor DIY modules maar iRangeX heeft ze dus in een case geplaatst met de module er in. Wel een tip voor zowel jou als @MsG, bestel een FTDI programmer mee om de firmware te kunnen flashen of modden. Het is vrij simpel om met Arduino de firmware te flashen, mits je de pinnen goed vast soldeerd.
Wat ook handig is om dan alvast te weten is dat de module wel aan moet staan om hem te kunnen flashen. Klinkt opzich logisch maar ik had mijn Taranis dus ook een keer op mijn Lizard staan als model waarbij ik de externe module had uitgeschakeld. Dan kan ie het bordje dus ook niet vinden en koste me toch al gauw een half uurtje en wat gevloek waarom het ineens niet meer werkte voordat het lampje ging branden.
De sales van Banggood zijn inderdaad altijd lekker vaag. Soms staat er ending in 1 day en een week later is de sale er nog steeds, soms verdwijnt een sale en 2 weken later staat ie er weer op etc. Misschien is het wel de moeite even een maandje te wachten tot black Friday en de feestdagen want de XSR was een week geleden ook 10e goedkoper al las ik vanmiddag dat ik beter voor een R-XSR kan gaan. Makkelijker te inverten en kleiner en lichter en die is nu sowieso out of stock.
Verder is er in mijn lijstje nu sowieso niks in de aanbieding op de VTX na welke ik alvast bestel.
Ook die 3e hand ga ik sowieso wel alvast bestellen want heb nog meer soldeer projectjes liggen en word gek van dat geval die ik nu heb.
Ik twijfel overigens nu wel tussen de Emax RS 2205, 2205s of de 2306 al vragen die laatste misschien weer iets te veel van de batterijen aangezien ik 2 best wel zwakke batterijen heb en het ook weer zonde is om die niet te kunnen gebruiken.
[ Voor 4% gewijzigd door Radiance op 03-11-2017 18:29 ]
:strip_icc():strip_exif()/u/586744/crop59aef03a8f74b_cropped.jpeg?f=community)
Precies zo gedaan als in het filmpje van SeByDocky. Knopje op de receiver gebruikt, ledje gaat dan snel knipperen en dan aansluiten op de powerbank. Dan binden met de receiver tot het lampje rustig knippert.Kars schreef op donderdag 2 november 2017 @ 08:21:
[...]
Kijk eens of je op de Tiny6 ontvanger een klein knopje zit, want de receiver moet snel knipperen.
-edit- dat betekend geen auto-bindexcuus!
Zie hier het filmpje van SeByDocky, waar hij dit uitlegt: YouTube: KingKong Tiny 6: unboxing, analysis, binding, configuration and demo...
Ik vraag me wel af of/wat ik met het volgende moet doen: in de manual staat "Default setting arm function use AUX1 channel"???
Iemand???
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
Kijk even in je FlySky transmitter welke knop AUX1 is (SWA, SWB, SWC enz). Wellicht zit ie op je draaiknop, dat zou onhandig zijn.Bugs3 schreef op vrijdag 3 november 2017 @ 18:39:
[...]
Precies zo gedaan als in het filmpje van SeByDocky. Knopje op de receiver gebruikt, ledje gaat dan snel knipperen en dan aansluiten op de powerbank. Dan binden met de receiver tot het lampje rustig knippert.
Ik vraag me wel af of/wat ik met het volgende moet doen: in de manual staat "Default setting arm function use AUX1 channel"???
Iemand???
1-7-4-10-2-8-6-12-3-9-5-11
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Als ik het me goed herinner zijn AUX 1 tot en met 4 de gimballs en 5 en 6 de pod meters. Dat is op de zender zelf. In Betaflight is het anders maar weet niet meer precies hoe.Bugs3 schreef op vrijdag 3 november 2017 @ 18:39:
[...]
Precies zo gedaan als in het filmpje van SeByDocky. Knopje op de receiver gebruikt, ledje gaat dan snel knipperen en dan aansluiten op de powerbank. Dan binden met de receiver tot het lampje rustig knippert.
Ik vraag me wel af of/wat ik met het volgende moet doen: in de manual staat "Default setting arm function use AUX1 channel"???
Iemand???
Ik zal morgen even kijken of ik je kan helpen.
Als ik het goed zie werkt dat hetzelfde als op een Q90 die ik hier nog heb liggen. (M'n grootste miskoop tot nu toe)
[ Voor 12% gewijzigd door Radiance op 03-11-2017 23:17 ]
Ik geloof dat ik het voor elkaar hebRadiance schreef op vrijdag 3 november 2017 @ 23:13:
[...]
Als ik het me goed herinner zijn AUX 1 tot en met 4 de gimballs en 5 en 6 de pod meters. Dat is op de zender zelf. In Betaflight is het anders maar weet niet meer precies hoe.
Ik zal morgen even kijken of ik je kan helpen.
Als ik het goed zie werkt dat hetzelfde als op een Q90 die ik hier nog heb liggen. (M'n grootste miskoop tot nu toe)
De Aux 1 bleek op een draaiknop te zitten zoals al gezegd. Die heb ik kunnen veranderen naar SWA. Daarna werkte het nog steeds niet
Maar ik heb nieuwe Betaflight er op geflashed conform het filmpje van SeByDocky dat Kars poste. Alle settings overgenomen en zowaar het lijkt te werken.
Helemaal blij. En ik moet nog veel leren blijkbaar over Betaflight en FlySky
Dank voor de hulp en de tips
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Top dat het werkt! Misschien is het wel nog een idee om even na te gaan in welke setting het hem nou precies zat want het zou ook in oudere versies van Betaflight moeten werken.Bugs3 schreef op vrijdag 3 november 2017 @ 23:49:
[...]
Ik geloof dat ik het voor elkaar heb
De Aux 1 bleek op een draaiknop te zitten zoals al gezegd. Die heb ik kunnen veranderen naar SWA. Daarna werkte het nog steeds niet
Maar ik heb nieuwe Betaflight er op geflashed conform het filmpje van SeByDocky dat Kars poste. Alle settings overgenomen en zowaar het lijkt te werken.
Helemaal blij. En ik moet nog veel leren blijkbaar over Betaflight en FlySky
Dank voor de hulp en de tips
Zo had ik laatst zelf ook ineens dat m'n lizard niet werkte maar had over het hoofd gezien dat het radio protocol veranderd was jaar PWM ipv SBUS. Ik had ergens iets veranderd waardoor Betaflight zelf voor PWM had gekozen want ik weet zeker dat ik dit zelf nooit heb gekozen.
Dat scheelt je wellicht gedoe in de toekomst, van iedere fout leer je tenslotte (cliché)
Ik nog even terug te komen op de rare crash van gisteren die ik had. Ik dacht dat de batterij los was gekomen waardoor ik de controle verloor maar na een crash vandaag testte ik de quad even LoS en toen gebeurde het weer terwijl de batterij nog gewoon goed strak zat. Het enigste wat ik me dan kan bedenken is dat het toch een ESC desync was maar snap niet hoe? Ik draai dshot 300 op 4x4khz met een cpu load van 35% gemiddeld in idle. Het gebeurde vandaag weer na een flip maar had in de tussentijd genoeg andere flips gemaakt. Zie je een ESC desync eigenlijk terug in de logs? Denk het niet toch?
Maar dan alsnog, waarom gebeurt dit compleet random? Is een ESC aan het einde van z'n latijn of vraag ik toch teveel van het bord? Ik draai wel pas dshot 300 sinds ik 'terug' ben in de hobby maar had er tot gisteren geen last van.
@MsG & @ChojinZ
Hier de foto van de settings van de multi module op de X7

[ Voor 3% gewijzigd door Radiance op 04-11-2017 00:40 ]
Ik weet het niet zeker maar denk dat het verschil zit in het aanmaken van modes. Ik heb een Horizon en een Airmode aangemaakt.Radiance schreef op zaterdag 4 november 2017 @ 00:36:
[...]
Top dat het werkt! Misschien is het wel nog een idee om even na te gaan in welke setting het hem nou precies zat want het zou ook in oudere versies van Betaflight moeten werken.
Zo had ik laatst zelf ook ineens dat m'n lizard niet werkte maar had over het hoofd gezien dat het radio protocol veranderd was jaar PWM ipv SBUS. Ik had ergens iets veranderd waardoor Betaflight zelf voor PWM had gekozen want ik weet zeker dat ik dit zelf nooit heb gekozen.
Dat scheelt je wellicht gedoe in de toekomst, van iedere fout leer je tenslotte (cliché)
...
Omdat ik geklaagd heb bij BangGood over het niet werken hebben ze mij een nieuwe toegestuurd (is onderweg) voor $10.00. Als die binnen is kan ik het mooi vergelijken.
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
Een dsync kun je terug zien in de log aan de throttle die gestuurd wordt naar de motor. Die schiet dan naar zijn max heb ik gelezen. Welke esc's gebruik je?Radiance schreef op zaterdag 4 november 2017 @ 00:36:
[...]
Top dat het werkt! Misschien is het wel nog een idee om even na te gaan in welke setting het hem nou precies zat want het zou ook in oudere versies van Betaflight moeten werken.
Zo had ik laatst zelf ook ineens dat m'n lizard niet werkte maar had over het hoofd gezien dat het radio protocol veranderd was jaar PWM ipv SBUS. Ik had ergens iets veranderd waardoor Betaflight zelf voor PWM had gekozen want ik weet zeker dat ik dit zelf nooit heb gekozen.
Dat scheelt je wellicht gedoe in de toekomst, van iedere fout leer je tenslotte (cliché)
Ik nog even terug te komen op de rare crash van gisteren die ik had. Ik dacht dat de batterij los was gekomen waardoor ik de controle verloor maar na een crash vandaag testte ik de quad even LoS en toen gebeurde het weer terwijl de batterij nog gewoon goed strak zat. Het enigste wat ik me dan kan bedenken is dat het toch een ESC desync was maar snap niet hoe? Ik draai dshot 300 op 4x4khz met een cpu load van 35% gemiddeld in idle. Het gebeurde vandaag weer na een flip maar had in de tussentijd genoeg andere flips gemaakt. Zie je een ESC desync eigenlijk terug in de logs? Denk het niet toch?
Maar dan alsnog, waarom gebeurt dit compleet random? Is een ESC aan het einde van z'n latijn of vraag ik toch teveel van het bord? Ik draai wel pas dshot 300 sinds ik 'terug' ben in de hobby maar had er tot gisteren geen last van.
@MsG & @ChojinZ
Hier de foto van de settings van de multi module op de X7
[afbeelding]
Bij sommige moet je een filter-cap verwijderen om dshot goed te laten werken.
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Ik zie eigenlijk niets raars in de log behalve dat ie ineens uit de lucht valt. Het gas blijft er wel op maar vrij laag. Ik gebruik dshot 300 op Racerstar RS30A v2. Doordat ik die cap nog heb kan ik niet naar 600 maar 300 zou gewoon moeten werken.BoAC schreef op zaterdag 4 november 2017 @ 07:40:
[...]
Een dsync kun je terug zien in de log aan de throttle die gestuurd wordt naar de motor. Die schiet dan naar zijn max heb ik gelezen. Welke esc's gebruik je?
Bij sommige moet je een filter-cap verwijderen om dshot goed te laten werken.
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
Deze heb je vast al gevonden: https://www.rcgroups.com/...gnal/page105#post36209787Radiance schreef op zaterdag 4 november 2017 @ 09:24:
[...]
Ik zie eigenlijk niets raars in de log behalve dat ie ineens uit de lucht valt. Het gas blijft er wel op maar vrij laag. Ik gebruik dshot 300 op Racerstar RS30A v2. Doordat ik die cap nog heb kan ik niet naar 600 maar 300 zou gewoon moeten werken.
Sommigen hebben idd geen problemen met het laten zitten van de cap. Anderen melden dezelfde problemen als jij.
Heb je de problemen ook met oneshot of pwm protocol? Dan zou het aan je motor kunnen liggen, 1 spoel los laat bijvoorbeeld: YouTube: Troubleshooting: Quadcopter Desync (Falls Out Of Sky)
Nog een andere oorzaak: YouTube: Desync example? Het is echt troubleshouting
En hier nog een manier om het probleem te vinden: YouTube: Blheli bench testing desync with reversed props
[ Voor 14% gewijzigd door BoAC op 04-11-2017 12:06 ]
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Dat had ik inderdaad al gelezen op rcgroups. Echter zie ik dat filmpje over die low throttle, die heb ik van de week wel wat omlaag gezet en daarna zijn de problemen pas begonnen. Denk dat ik die eerst maar eens terug zet.
Heb net nog even gevlogen voordat het begon te regenen en had nu geen problemen ook niet na een paar flips vrij snel achter elkaar om te testen.
Ik had van de week wat spullen van Conrad nodig trouwens en wilde voor een euro te weinig in het karretje geen verzendkosten betalen zag dat de Tattu 75c 1300mah batterijen daar maar €20,90 waren dus daar er eentje van mee besteld. Ik kreeg in de doos een 1550mah batterij en hij vliegt erg goed moet ik zeggen. Dit is wel de beste batterij die ik nu heb in ieder geval en vanaf 20 euro betaal je sowieso geen verzendkosten bij Conrad dus 20,90 inclusief verzendkosten is een nette prijs dacht ik zo.
Heb net nog even gevlogen voordat het begon te regenen en had nu geen problemen ook niet na een paar flips vrij snel achter elkaar om te testen.
Ik had van de week wat spullen van Conrad nodig trouwens en wilde voor een euro te weinig in het karretje geen verzendkosten betalen zag dat de Tattu 75c 1300mah batterijen daar maar €20,90 waren dus daar er eentje van mee besteld. Ik kreeg in de doos een 1550mah batterij en hij vliegt erg goed moet ik zeggen. Dit is wel de beste batterij die ik nu heb in ieder geval en vanaf 20 euro betaal je sowieso geen verzendkosten bij Conrad dus 20,90 inclusief verzendkosten is een nette prijs dacht ik zo.
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 13-05 11:47
Prrrr bleep boem!
Ik heb vandaag even een paar lipo's leeg gevlogen.ChojinZ schreef op donderdag 2 november 2017 @ 17:30:
[...]
En hoe vliegt het RL? Ook beter of merk je daar het verschil niet?
Het is een groot verschil met de Flysky, er is met de Taranis gewoon veel meer controle over de quad, smooth vliegen gaat nu ook veel makkelijker het voelt meer alsof je op rails vliegt.
Nou heb ik wel de hall gimbals in de mijne zitten (X7S), daar zal vast ook nog wel verschil tussen de X7 en X7S zitten.
Synthpop muziek: https://soundcloud.com/boppeaux
Mijn eerste ervaringen met de KingKong Tiny6 t.o.v. Eachine E010S:
Een stuk sneller en agressiever. Kwam ik met de Eachine E010S nog weg met de hoek omkomen door alleen gebruik te maken van Yaw, met de Tiny6 moet je ook pitch en roll gebruiken. Deze quad neemt z'n momentum mee en in het kleine huis waar ik woon is dat wel ff een dingetje. Voor mij weer leerpunten...
Daarnaast veel gekeken naar de instellingen in BetaFlight. Ook vrij nieuw voor mij. Het maakt het vliegen een stuk uitgebreider en veelzijdiger.....
Alleen failsafe krijg ik niet goed. Schijnt echt een probleem te zijn voor de Tiny6. Binnen natuurlijk geen probleem maar als ik naar buiten ga wil ik dat wel voor elkaar hebben.
Een stuk sneller en agressiever. Kwam ik met de Eachine E010S nog weg met de hoek omkomen door alleen gebruik te maken van Yaw, met de Tiny6 moet je ook pitch en roll gebruiken. Deze quad neemt z'n momentum mee en in het kleine huis waar ik woon is dat wel ff een dingetje. Voor mij weer leerpunten...
Daarnaast veel gekeken naar de instellingen in BetaFlight. Ook vrij nieuw voor mij. Het maakt het vliegen een stuk uitgebreider en veelzijdiger.....
Alleen failsafe krijg ik niet goed. Schijnt echt een probleem te zijn voor de Tiny6. Binnen natuurlijk geen probleem maar als ik naar buiten ga wil ik dat wel voor elkaar hebben.
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Die gimbals wil ik er ooit ook nog wel een keer inzetten maar vind het met de normale gimbals ook al een wereld van verschil. Dat vliegen op rails had ik juist niet. Doordat ze veel gevoeliger en preciezer zijn vloog ik zeker de eerste paar keer veel onrustiger maar krijg het steeds beter onder de knie. Inmiddels gaat het inderdaad wel soepeler en beter, met name in de throttle merk ik het goed.noobgrinder schreef op zaterdag 4 november 2017 @ 15:59:
[...]
Ik heb vandaag even een paar lipo's leeg gevlogen.
Het is een groot verschil met de Flysky, er is met de Taranis gewoon veel meer controle over de quad, smooth vliegen gaat nu ook veel makkelijker het voelt meer alsof je op rails vliegt.
Nou heb ik wel de hall gimbals in de mijne zitten (X7S), daar zal vast ook nog wel verschil tussen de X7 en X7S zitten.
Het onrustiger vliegen heeft trouwens ook te maken met mijn rates, die heb ik behoorlijk omhoog gegooid de afgelopen dagen, beetje bij beetje.
:strip_icc():strip_exif()/u/23965/crop5e6625671ade4.jpeg?f=community)
Weet iemand hoe dat zit? Ik was net op straat voor het huis (buiten bebouwde kom, weg is niet breed genoeg dat auto's elkaar passeren zonder door de berm te moeten)met de drone wat aan het spelen (Mavic). Normaal komt daar eigenlijk nooit iemand langs (1x per 5 minuten ongeveer) maar precies toen ik aan het landen was komt er opeens iemand in een busje met zeer hoge snelheid de bocht om. Je mag er maar 60, maar hij reed zeker 90 en ik kon nog net mijn drone weggraaien terwijl hij druk handgebaren aan het maken was dat ik vooral snel weg moest wezen.
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
[ Voor 12% gewijzigd door M_V op 05-11-2017 17:07 ]
Ik constateer dat de punch van mijn Tiny6 wat aan de matige kant is. Met name als de batterij wat leger begint te raken. Kan ik dit ergens verbeteren in BetaFlight?
En nog een newbee vraag : Kan het aanpassen van de PID invloed hebben op het batterijverbruik?
En nog een newbee vraag
[ Voor 23% gewijzigd door Bugs3 op 05-11-2017 17:51 . Reden: Extra vraag ]
Geen idee hoe dat zit. Lijkt me vrij lomp van de bestuurder. Misschien in e.o.a. verkeerstopic navragen?M_V schreef op zondag 5 november 2017 @ 17:06:
Weet iemand hoe dat zit? Ik was net op straat voor het huis (buiten bebouwde kom, weg is niet breed genoeg dat auto's elkaar passeren zonder door de berm te moeten)met de drone wat aan het spelen (Mavic). Normaal komt daar eigenlijk nooit iemand langs (1x per 5 minuten ongeveer) maar precies toen ik aan het landen was komt er opeens iemand in een busje met zeer hoge snelheid de bocht om. Je mag er maar 60, maar hij reed zeker 90 en ik kon nog net mijn drone weggraaien terwijl hij druk handgebaren aan het maken was dat ik vooral snel weg moest wezen.
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Volgens mij mag je überhaupt al niet vliegen bij een weg en moet je daar minimaal 50 meter bij vandaan blijven. Als voetganger heb je ook geen voorrang behalve bij een zebrapad. Daarbij is het een 60 weg, geen een woonerf.M_V schreef op zondag 5 november 2017 @ 17:06:
Weet iemand hoe dat zit? Ik was net op straat voor het huis (buiten bebouwde kom, weg is niet breed genoeg dat auto's elkaar passeren zonder door de berm te moeten)met de drone wat aan het spelen (Mavic). Normaal komt daar eigenlijk nooit iemand langs (1x per 5 minuten ongeveer) maar precies toen ik aan het landen was komt er opeens iemand in een busje met zeer hoge snelheid de bocht om. Je mag er maar 60, maar hij reed zeker 90 en ik kon nog net mijn drone weggraaien terwijl hij druk handgebaren aan het maken was dat ik vooral snel weg moest wezen.
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
Neemt niet weg dat het gedrag van de bestuurder opgefokt overkomt maar vind toch wel dat hij gelijk heeft in de zin van waarom sta jij daar stil op een doorgaande 60 weg. Dat hij te hard reed is weer een hele andere discussie maar ik persoonlijk vind het nogal lomp dat je op het midden van de weg met je drone gaat vliegen, ondanks dat het er rustig is. En dan ook nog eens op een 60 weg, dat is gevaarlijk en vragen om problemen.
Maar goed, ik zit echt met een dilemma. De kogel is min of meer door de kerk. Ik ga een nieuwe quad bouwen maar kan maar niet kiezen voor een flight controller. Ik ga wel voor de Emax RS2306 en lees her en der dat de Matek die ik op het oog had hier niet echt goed tegen kan. Electrische en mechanische noise. Kan opgelost worden met caps op alle ESC maar dat vind ik toch niet ideaal. Ik wil echt voor een lichtgewicht build gaan maar het hoeft ook weer niet minimalistisch licht.
Toen ik vandaag mijn GoPro leeg was had ik deze eraf gehaald en merkte toch wel dat die 100 gram totaal echt een verschil maakt. Ik wil daarom een Runcam Split aanschaffen. De latency schijnt hoog te zijn maar ik ben geen racer en doe vooral wat rustige freestyle. De props in beeld vind ik niet zo'n groot probleem en het beeld vind ik zelf erg goed. Beter dan de Eagle 2 en mooier dan mijn Hero3 voor de HD opnames.
Maar weer terug naar de FC want de rest van de setup is inmiddels wel bepaald. Iemand nog suggesties? Ik twijfel toch voor een Matek 405 AIO, Holybrother Kakute of toch een AIO Omnibus, en dan welke? Ik kwam net een softmount gyro tegen op een F7 Omnibus maar kan er verder nog erg weinig over vinden. Ook de Omnibus Corner spreekt mij wel aan maar ze hebben allemaal wel hun voors en tegens.
Edit: ik lees in de verschillende topics op rcgroups dat eigenlijk al die snelle gyros last hebben van hetzelfde probleem. Dat brengt mij dus terug naar de Matek. Als zo'n softmount op de FC niet meer toe voegt dan softmount stand offs en er nog steeds caps nodig zijn dan denk ik dat de Matek de beste optie is.
[ Voor 4% gewijzigd door Radiance op 05-11-2017 23:16 ]
Verwijderd
Jij was in deze fout. De bestuurder van het busje mag ook niet te hard rijden, maar dat doet er niet aan af dan je niet volgens de regels bezig bent.M_V schreef op zondag 5 november 2017 @ 17:06:
Weet iemand hoe dat zit? Ik was net op straat voor het huis (buiten bebouwde kom, weg is niet breed genoeg dat auto's elkaar passeren zonder door de berm te moeten)met de drone wat aan het spelen (Mavic). Normaal komt daar eigenlijk nooit iemand langs (1x per 5 minuten ongeveer) maar precies toen ik aan het landen was komt er opeens iemand in een busje met zeer hoge snelheid de bocht om. Je mag er maar 60, maar hij reed zeker 90 en ik kon nog net mijn drone weggraaien terwijl hij druk handgebaren aan het maken was dat ik vooral snel weg moest wezen.
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
- cavey
- Registratie: Augustus 2000
- Laatst online: 17-02 19:31
:strip_icc():strip_exif()/u/10361/nylon_beat.jpg?f=community)
@Radiance Een cap van 1000uF/35V op je batterij aansluiting zou toch voldoende smoothing moeten geven voor de stroomvoorziening van je FC?
Misschien is een KISS setup dan het overwegen waard? Zelf zit ik ook te kijken naar een omnibus f4, en heb me berust bij het feit dat alles blijkbaar gesoftmount moet worden tegenwoordig Of dit dan via een los boardje gaat, of geintegreerd in de FC maakt me dan verder niet zo uit. Beperkende factor (ruimte) is toch veelal het frame wat je gaat kiezen. Het gewicht volgt daar meestal wel uit.
Of dit dan via een los boardje gaat, of geintegreerd in de FC maakt me dan verder niet zo uit. Beperkende factor (ruimte) is toch veelal het frame wat je gaat kiezen. Het gewicht volgt daar meestal wel uit.
Ga je voor losse ESC's, of voor een PDB/ESC 4-in-1 systeem?Want dan zou de Matek FC wel een mooie combo zijn met zo'n 4-in-1 pdb/esc met aansluiting voor betreffende FC.
Misschien is een KISS setup dan het overwegen waard? Zelf zit ik ook te kijken naar een omnibus f4, en heb me berust bij het feit dat alles blijkbaar gesoftmount moet worden tegenwoordig
Ga je voor losse ESC's, of voor een PDB/ESC 4-in-1 systeem?Want dan zou de Matek FC wel een mooie combo zijn met zo'n 4-in-1 pdb/esc met aansluiting voor betreffende FC.
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Hij mag daar rijden maar rijd te hard. Jij echter hebt daar helemaal niets te zoeken. Dat jij daar vliegt vind ik erger dan iemand die te hard rijd. Een drone laten opstijgen, vliegen en landen op de openbare weg is gewoon best wel dom. En hardstikke verboden. Je mag niet boven de weg vliegen en je moet verder dan 50 meter van huizen vandaan vliegen...M_V schreef op zondag 5 november 2017 @ 17:06:
Weet iemand hoe dat zit? Ik was net op straat voor het huis (buiten bebouwde kom, weg is niet breed genoeg dat auto's elkaar passeren zonder door de berm te moeten)met de drone wat aan het spelen (Mavic). Normaal komt daar eigenlijk nooit iemand langs (1x per 5 minuten ongeveer) maar precies toen ik aan het landen was komt er opeens iemand in een busje met zeer hoge snelheid de bocht om. Je mag er maar 60, maar hij reed zeker 90 en ik kon nog net mijn drone weggraaien terwijl hij druk handgebaren aan het maken was dat ik vooral snel weg moest wezen.
Maar nu de vraag: dit is uiteraard niet echt een heer in het verkeer, maar heeft hij gelijk? Mag je op straat staan en daar gewoon blijven staan en heb je dan voorrang? Ik neem aan dat sommige andere drone-bezitters ook weleens zoiets meemaken, vooral omdat je met die korte pootjes van de mavic eigenlijk toch het lekkerst opstijgt en landt vanaf iets met asfalt (of vanuit de hand).
KISS FC geen optie? Dan weet je in iedergeval zeker dat de hardware goed is.Radiance schreef op zondag 5 november 2017 @ 21:22:
[...]
Maar weer terug naar de FC want de rest van de setup is inmiddels wel bepaald. Iemand nog suggesties? Ik twijfel toch voor een Matek 405 AIO, Holybrother Kakute of toch een AIO Omnibus, en dan welke? Ik kwam net een softmount gyro tegen op een F7 Omnibus maar kan er verder nog erg weinig over vinden. Ook de Omnibus Corner spreekt mij wel aan maar ze hebben allemaal wel hun voors en tegens.
[ Voor 17% gewijzigd door ChojinZ op 06-11-2017 11:55 ]
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Dat doe ik al standaard maar het schijnt tegenwoordig ook geen overbodige luxe te zijn als je ook nog wat kleinere caps van de power leads gooit van de ESC. Het gaat in dit geval meer om de motor keuze, die schijnen nogal wat ruis te veroorzaken door de power die ze hebben.cavey schreef op maandag 6 november 2017 @ 11:53:
@Radiance Een cap van 1000uF/35V op je batterij aansluiting zou toch voldoende smoothing moeten geven voor de stroomvoorziening van je FC?
Misschien is een KISS setup dan het overwegen waard? Zelf zit ik ook te kijken naar een omnibus f4, en heb me berust bij het feit dat alles blijkbaar gesoftmount moet worden tegenwoordig
Ga je voor losse ESC's, of voor een PDB/ESC 4-in-1 systeem?Want dan zou de Matek FC wel een mooie combo zijn met zo'n 4-in-1 pdb/esc met aansluiting voor betreffende FC.
Ik ga sowieso voor losse ESC anders word de stack denk ik te hoog plus al er een keer eentje stuk gaat hoef je niet direct alles te vervangen.
Het bordje van de Runcam Split gaat namelijk ook in die stack.
Ik heb geen ervaring met KISS maar wil toch wel graag bij Betaflight bliiven met de OSD functies en lua scripts voor de Taranis. Dat lijkt mij toch wel erg handig als ik wil gaan tunen.
Qua ruimte zit het verder wel goed. Ik wil voor een Realacc X5R gaan. Zat ook nog te kijken naar een Martian en een Lisam frame maar de Martian is weer een stukje zwaarder en de Lisam heeft een vrij dunne top plate en de bodemplaat bestaat uit 1 geheel wat mij ook wat minder aanspreekt. Ik wil sowieso een frame waarbij de batterij bovenop ligt omdat landen nog niet mijn sterkste kant is.
- Poecillia
- Registratie: Januari 2002
- Laatst online: 26-04 20:34
:strip_icc():strip_exif()/u/44551/crop593cf5fb54051.jpeg?f=community)
Ik overweeg aanschaf van een drone, maar ik kwam erachter dat de grens van een no-fly-zone precies over ons perceel heen loopt. Ik vroeg me af hoe nauwkeurig die zones staan afgebeeld op de kaart en hoe nauwkeurig de geofencing in de modellen van DJI en Yuneec werkt. Met een beetje pech kan ik deze drones niet in mijn eigen tuin laten opstijgen. Omdat we buiten de bebouwde kom wonen op een groot perceel was dat nu juist de bedoeling. Alternatief is een testje met een drone bij mij thuis. Is er iemand met een DJI of Yuneec met geofencing in Oost Groningen?
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
KISS werk ook met betaflight dus dat zou geen probleem mogen zijn.Radiance schreef op maandag 6 november 2017 @ 12:24:
[...]
Ik heb geen ervaring met KISS maar wil toch wel graag bij Betaflight bliiven met de OSD functies en lua scripts voor de Taranis. Dat lijkt mij toch wel erg handig als ik wil gaan tunen.
Wat je ook doet, DUMP die Lisam. Ik heb zelf de 130mm versie en dat is echt een zwaar baggerframe. Niet stabiel te krijgen, na de eerste (lichte) crash meteen al een scheur in de arm....Radiance schreef op maandag 6 november 2017 @ 12:24:
[...]
Qua ruimte zit het verder wel goed. Ik wil voor een Realacc X5R gaan. Zat ook nog te kijken naar een Martian en een Lisam frame maar de Martian is weer een stukje zwaarder en de Lisam heeft een vrij dunne top plate en de bodemplaat bestaat uit 1 geheel wat mij ook wat minder aanspreekt. Ik wil sowieso een frame waarbij de batterij bovenop ligt omdat landen nog niet mijn sterkste kant is.
3 maanden aan het frame gesleuteld, flink wat geld tegen aan gekwakt, maar dat ding heeft nog nooit lekker gevlogen.
Sterker nog, je (of iemand anders) mag het 130mm frame zo gratis van me hebben (geen grap). Maar ik weet nu al dat ik niemand gelukkig maak met dat frame.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Ik ben uiteindelijk toch voor de Matek gegaan. Die kwam overall toch het beste uit.
Dit is het lijstje geworden uiteindelijk:
Heb ook wel erg veel zin om hem te gaan bouwen. Ik ben inmiddels een heel stuk beter met solderen dus het moet dit keer wel een mooie strakke build worden denk ik zo.
Dit is het lijstje geworden uiteindelijk:
- Runcam Split 2
- Emax RS2306
- FrSky R-XSR
- Realacc X5R
- Matek F405 AIO
- Racerstar Tattoo 30A BLHeli 32
- Eachine TX526
- Realacc Pagoda 5dBi antenne
Heb ook wel erg veel zin om hem te gaan bouwen. Ik ben inmiddels een heel stuk beter met solderen dus het moet dit keer wel een mooie strakke build worden denk ik zo.
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
De racerstar esc heeft BLHeli_32 niet BLHeliS.Radiance schreef op maandag 6 november 2017 @ 19:40:
Ik ben uiteindelijk toch voor de Matek gegaan. Die kwam overall toch het beste uit.
Dit is het lijstje geworden uiteindelijk:Dat is wel een aardige upgrade vanaf een ZMR250 frame met SP F3 clone (I2C Gyro), HubOSD, Racerstart BR2205 en Racerstart BLheli S met cap dus dshot 300.
- Runcam Split 2
- Emax RS2306
- FrSky R-XSR
- Realacc X5R
- Matek F405 AIO
- Racerstar Tattoo 30A
- Eachine TX526
- Realacc Pagoda 5dBi antenne
Heb ook wel erg veel zin om hem te gaan bouwen. Ik ben inmiddels een heel stuk beter met solderen dus het moet dit keer wel een mooie strakke build worden denk ik zo.
Ik zou voor een betere transmitter gaan dan een Eachine. Kijk de review van Joshua door
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Dat weet ik, mijn oude ESC hebben BLHeli S. Heb m'n post aangepast zodat het wat duidelijker is.
Ik heb deze VTX al en ben er eigenlijk heel erg tevreden over. Ik heb nog prima beeld binnen het bereik waar ik vlieg met mijn Cyclops. Ik heb op m'n goggle ook maar 1 antenne zonder verdere poes pas dus voor nu is dat prima. Hij was met de flash sale inc verzenden ook maar 11 euro.
Op het veld waar ik vlieg heb ik op zo'n 200 meter afstand achter 3 bomen nog voldoende beeld om te kunnen vliegen.
Op het veld waar ik voorheen vloog had je 3 voetbal velden gescheiden door bomen en ik kon prima van het ene veld naar het andere veld vliegen.
En omdat ik toch altijd alleen vlieg hoef ik ook geen rekening te houden met anderen. Die enkele keer dat ik dan eens met een groepje ga vliegen kan ik het aantal mw omlaag zetten of even wachten totdat er niemand anders vliegt.
Het enigste wat ik nu vergeet zijn 1000uf 35v condensatoren. Die waren op...als die van Ali er niet op tijd zijn moet ik er maar eentje uit m'n oude quad halen.
Ik kwam net dit tegen op Facebook.
http://www.racedronesoft.com
Ziet er een stuk beter uit dan EZ Ground Station en er is nu ook een blackbox app uit.
Aan de blackbox app heb ik nu nog niets omdat mijn huidige FC alleen onboard blackbox heeft maar voor de mensen met een sd card reader kan dit wel eens heel handig zijn.
Ik heb deze VTX al en ben er eigenlijk heel erg tevreden over. Ik heb nog prima beeld binnen het bereik waar ik vlieg met mijn Cyclops. Ik heb op m'n goggle ook maar 1 antenne zonder verdere poes pas dus voor nu is dat prima. Hij was met de flash sale inc verzenden ook maar 11 euro.
Op het veld waar ik vlieg heb ik op zo'n 200 meter afstand achter 3 bomen nog voldoende beeld om te kunnen vliegen.
Op het veld waar ik voorheen vloog had je 3 voetbal velden gescheiden door bomen en ik kon prima van het ene veld naar het andere veld vliegen.
En omdat ik toch altijd alleen vlieg hoef ik ook geen rekening te houden met anderen. Die enkele keer dat ik dan eens met een groepje ga vliegen kan ik het aantal mw omlaag zetten of even wachten totdat er niemand anders vliegt.
Het enigste wat ik nu vergeet zijn 1000uf 35v condensatoren. Die waren op...als die van Ali er niet op tijd zijn moet ik er maar eentje uit m'n oude quad halen.
Ik kwam net dit tegen op Facebook.
http://www.racedronesoft.com
Ziet er een stuk beter uit dan EZ Ground Station en er is nu ook een blackbox app uit.
Aan de blackbox app heb ik nu nog niets omdat mijn huidige FC alleen onboard blackbox heeft maar voor de mensen met een sd card reader kan dit wel eens heel handig zijn.
[ Voor 21% gewijzigd door Radiance op 07-11-2017 06:59 ]
- foekie01
- Registratie: December 2012
- Laatst online: 17-07-2024
Ik heb een vraag betreffende film ploegen en inspectie bedrijven. Hoe zit dat nou? Als je een DJI koopt, dan houdt deze rekening met de no-fly zones. Betekent dus dat daar niet op mag stijgen. Echter zie ik steeds meer TV programma's met fancy shots van allerlei gebouwen en (woon)gebieden en steeds vaker vraag ik mij af: hoe doen ze dit? Zoeken zij "safe" gebieden uit om te filmen, vragen ze ontzegging of hebben ze simpelweg eigen drones die ze dan zonder check de lucht in kunnen jagen? Ook zoiets als inspectie bedrijven. Hoe kunnen deze boven een fabriek vliegen? Ik las laatst bijvoorbeeld dat het "dones anti-wiet plantage in een mais veld" initiatief aardig belemmerd werd door de no fly zones in Limburg dus hoe doen die andere bedrijven dat?
Ik hoop dat iemand me kan helpen, ik vraag het me al geruime tijd af Alvast bedankt!
Ik hoop dat iemand me kan helpen, ik vraag het me al geruime tijd af
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Vrij simpel: men heeft hiervoor de juiste papierenfoekie01 schreef op dinsdag 7 november 2017 @ 08:07:
Ik heb een vraag betreffende film ploegen en inspectie bedrijven. Hoe zit dat nou? Als je een DJI koopt, dan houdt deze rekening met de no-fly zones. Betekent dus dat daar niet op mag stijgen. Echter zie ik steeds meer TV programma's met fancy shots van allerlei gebouwen en (woon)gebieden en steeds vaker vraag ik mij af: hoe doen ze dit? Zoeken zij "safe" gebieden uit om te filmen, vragen ze ontzegging of hebben ze simpelweg eigen drones die ze dan zonder check de lucht in kunnen jagen? Ook zoiets als inspectie bedrijven. Hoe kunnen deze boven een fabriek vliegen? Ik las laatst bijvoorbeeld dat het "dones anti-wiet plantage in een mais veld" initiatief aardig belemmerd werd door de no fly zones in Limburg dus hoe doen die andere bedrijven dat?
Ik hoop dat iemand me kan helpen, ik vraag het me al geruime tijd af
Maar dat zijn er nogal wat: de piloot heeft een vliegbrevet nodig en het bedrijf een ROC-vergunning (of ROC-light als de drone minder dan 4kg is). De eigenaar van de drone moet een bewijs van luchtwaardigheid en Bewijs van Inschrijving in het Luchtvaartregister hebben voor zijn drone. Die vergunningen kun je aanvragen bij de Inspectie Leefomgeving & Transport.
Daarnaast moet het bedrijf vaak ook van te voren aangeven waar ze gaan vliegen als het een no-fly zone betreft, om een eventuele tijdelijke ontheffing aan te vragen.
1-7-4-10-2-8-6-12-3-9-5-11
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Daar ben ik vorige week nog naar toe gereden. Maar die veldjes zijn nu weg. Word weer vol gegooid met nieuwe koop appartementen. Werkzaamheden zijn al begonnen.Radiance schreef op maandag 6 november 2017 @ 21:02:
Op het veld waar ik voorheen vloog had je 3 voetbal velden gescheiden door bomen en ik kon prima van het ene veld naar het andere veld vliegen.
En zo blijven er steeds minder plekken over.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Jammer hoor, dat was een mooie locatie. Maar het veld met die bomen waar ik nu vlieg vind ik ook erg leuk. Als ik het vanmiddag red om te vliegen voor het donker wordt zal ik eens een filmpje opnemen van die locatie.ChojinZ schreef op dinsdag 7 november 2017 @ 08:56:
[...]
Daar ben ik vorige week nog naar toe gereden. Maar die veldjes zijn nu weg. Word weer vol gegooid met nieuwe koop appartementen. Werkzaamheden zijn al begonnen.
En zo blijven er steeds minder plekken over.
Zondag ging het echt lekker met onder die bomen door vliegen. Uitstekende oefening om m'n gas te leren doseren en niet te paniekerig te sturen als de stam of een tak ineens dichtbij komt.
:strip_icc():strip_exif()/u/77131/crop5d0893753034a_cropped.jpeg?f=community)
{kind=link}
Ik heb sinds kort een DJI Phatom 3 Advanced, wat is dat vliegen geweldig leuk!
Afgelopen weekend mijn eerste panorama gemaakt, valt me niet tegen: https://kuula.co/post/7lc0t
Afgelopen weekend mijn eerste panorama gemaakt, valt me niet tegen: https://kuula.co/post/7lc0t
Verwijderd
Heb je hier een vergunning voor? Want waar je nu vliegt mag niet zonder de juiste papieren.Danielson schreef op dinsdag 7 november 2017 @ 10:04:
Ik heb sinds kort een DJI Phatom 3 Advanced, wat is dat vliegen geweldig leuk!
Afgelopen weekend mijn eerste panorama gemaakt, valt me niet tegen: https://kuula.co/post/7lc0t
- MsG
- Registratie: November 2007
- Laatst online: 00:32
Forumzwerver
Maar papieren geven je puur de permissie dit zakelijk te doen, maar het verandert de no-fly regels niet. Ik zie structureel shots in tv-programma's die formeel niet mogen, ik heb het idee dat TV-productiebedrijven er soms nog aardig schijt aan lijken te hebben. Ken ook wel bedrijven die dit clandestien doen. Het is enorm duur en je mag dan formeel nog steeds op veel plekken niet vliegen.Kars schreef op dinsdag 7 november 2017 @ 08:39:
[...]
Vrij simpel: men heeft hiervoor de juiste papieren
Maar dat zijn er nogal wat: de piloot heeft een vliegbrevet nodig en het bedrijf een ROC-vergunning (of ROC-light als de drone minder dan 4kg is). De eigenaar van de drone moet een bewijs van luchtwaardigheid en Bewijs van Inschrijving in het Luchtvaartregister hebben voor zijn drone. Die vergunningen kun je aanvragen bij de Inspectie Leefomgeving & Transport.
Daarnaast moet het bedrijf vaak ook van te voren aangeven waar ze gaan vliegen als het een no-fly zone betreft, om een eventuele tijdelijke ontheffing aan te vragen.
Met veel OSD-chips kan je ook leuk integreren met Betaflight, waardoor je heel veel settings ook vanuit je goggles kan instellen. Gebruik het zelf met MWOSD (canvas mode heet het). Volgens mij gaan beide projecten steeds meer naar een universele communicatie waardoor je straks misschien wel álle settings kan wijzigen die je ook in Betaflight Configurator kan.Radiance schreef op maandag 6 november 2017 @ 21:02:
Dat weet ik, mijn oude ESC hebben BLHeli S. Heb m'n post aangepast zodat het wat duidelijker is.
Ik heb deze VTX al en ben er eigenlijk heel erg tevreden over. Ik heb nog prima beeld binnen het bereik waar ik vlieg met mijn Cyclops. Ik heb op m'n goggle ook maar 1 antenne zonder verdere poes pas dus voor nu is dat prima. Hij was met de flash sale inc verzenden ook maar 11 euro.
Op het veld waar ik vlieg heb ik op zo'n 200 meter afstand achter 3 bomen nog voldoende beeld om te kunnen vliegen.
Op het veld waar ik voorheen vloog had je 3 voetbal velden gescheiden door bomen en ik kon prima van het ene veld naar het andere veld vliegen.
En omdat ik toch altijd alleen vlieg hoef ik ook geen rekening te houden met anderen. Die enkele keer dat ik dan eens met een groepje ga vliegen kan ik het aantal mw omlaag zetten of even wachten totdat er niemand anders vliegt.
Het enigste wat ik nu vergeet zijn 1000uf 35v condensatoren. Die waren op...als die van Ali er niet op tijd zijn moet ik er maar eentje uit m'n oude quad halen.
Ik kwam net dit tegen op Facebook.
http://www.racedronesoft.com
Ziet er een stuk beter uit dan EZ Ground Station en er is nu ook een blackbox app uit.
Aan de blackbox app heb ik nu nog niets omdat mijn huidige FC alleen onboard blackbox heeft maar voor de mensen met een sd card reader kan dit wel eens heel handig zijn.
BTW @Radiance heb jij die Cyclops ombouw materiaal nog ergens? Jij had een vrij duidelijke tutorial, maar je site lijkt dood :-P.
[ Voor 49% gewijzigd door MsG op 07-11-2017 12:18 ]
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Veel info kun je vinden op https://www.rijksoverheid.nl/onderwerpen/drone en https://www.rijksoverheid...ntwoord/vliegen-met-droneMsG schreef op dinsdag 7 november 2017 @ 12:08:
[...]
Maar papieren geven je puur de permissie dit zakelijk te doen, maar het verandert de no-fly regels niet. Ik zie structureel shots in tv-programma's die formeel niet mogen, ik heb het idee dat TV-productiebedrijven er soms nog aardig schijt aan lijken te hebben. Ken ook wel bedrijven die dit clandestien doen. Het is enorm duur en je mag dan formeel nog steeds op veel plekken niet vliegen.
Leuk leesvoer, maar geeft ook wel een vreemd beeld van wat wel en niet mag (de woorden 'in principe' maken het er niet makkelijker op).
1-7-4-10-2-8-6-12-3-9-5-11
- MsG
- Registratie: November 2007
- Laatst online: 00:32
Forumzwerver
Ja ik ken de regels, maar de producenten juist niet ;-). Toch snap ik ook wel dat als bijv. het programma Rijdende Rechter net een burenruzie in Eelde heeft (no fly-zone) en er geen vuiltje aan de horizon is, je weet dat er niks vliegt dat je dan als producer toch even een luchtshot regelt. Je moet in die zin toch mee met de illegale concurrentie die er al is. Zo heeft Floortje volgens mij ook zo'n Mavic-achtig ding bij zich, maar in de landen van haar bezoek is dat wellicht wat eenvoudiger te regelen ;-).Kars schreef op dinsdag 7 november 2017 @ 12:20:
[...]
Veel info kun je vinden op https://www.rijksoverheid.nl/onderwerpen/drone en https://www.rijksoverheid...ntwoord/vliegen-met-drone
Leuk leesvoer, maar geeft ook wel een vreemd beeld van wat wel en niet mag (de woorden 'in principe' maken het er niet makkelijker op).
Kwam ook dit artikel tegen over deze kwesties: https://www.dronewatch.nl...overtreden-door-omroepen/
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Afgelopen zomer was of SBS6 of RTL (weet ff niet meer welke) flink in opspraak omdat ze met een 60km per uur over een overvol Schevenings strand vlogen met een DJI InspireMsG schreef op dinsdag 7 november 2017 @ 12:08:
[...]
Maar papieren geven je puur de permissie dit zakelijk te doen, maar het verandert de no-fly regels niet. Ik zie structureel shots in tv-programma's die formeel niet mogen, ik heb het idee dat TV-productiebedrijven er soms nog aardig schijt aan lijken te hebben. Ken ook wel bedrijven die dit clandestien doen. Het is enorm duur en je mag dan formeel nog steeds op veel plekken niet vliegen.
Het schijnt dat ze daar een boete voor hebben gekregen maar ik had ook begrepen dat ze die boete al hadden ingecalculeerd. Dus ja, je mening deel ik!
Onlangs overgestapt naar een Tramp HV. Die heeft ook weer extra OSD optie's. Temps van je VTX uitlezen, zendvermogen aanpassen.... het word er allemaal wel makkelijker op. Toen ik net begon met quads moest ik voor elke aanpassing mijn quad aansluiten op mijn laptop. Zeker in het veld was dat super irritant.MsG schreef op dinsdag 7 november 2017 @ 12:08:
[...]
[...]
Met veel OSD-chips kan je ook leuk integreren met Betaflight, waardoor je heel veel settings ook vanuit je goggles kan instellen. Gebruik het zelf met MWOSD (canvas mode heet het). Volgens mij gaan beide projecten steeds meer naar een universele communicatie waardoor je straks misschien wel álle settings kan wijzigen die je ook in Betaflight Configurator kan.
[video]
[video]
BTW @Radiance heb jij die Cyclops ombouw materiaal nog ergens? Jij had een vrij duidelijke tutorial, maar je site lijkt dood :-P.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Ik krijg nu al een fc met alles erop en eraan maar ga die filmpjes wel nog even checken.MsG schreef op dinsdag 7 november 2017 @ 12:08:
[...]
Maar papieren geven je puur de permissie dit zakelijk te doen, maar het verandert de no-fly regels niet. Ik zie structureel shots in tv-programma's die formeel niet mogen, ik heb het idee dat TV-productiebedrijven er soms nog aardig schijt aan lijken te hebben. Ken ook wel bedrijven die dit clandestien doen. Het is enorm duur en je mag dan formeel nog steeds op veel plekken niet vliegen.
[...]
Met veel OSD-chips kan je ook leuk integreren met Betaflight, waardoor je heel veel settings ook vanuit je goggles kan instellen. Gebruik het zelf met MWOSD (canvas mode heet het). Volgens mij gaan beide projecten steeds meer naar een universele communicatie waardoor je straks misschien wel álle settings kan wijzigen die je ook in Betaflight Configurator kan.
[video]
[video]
BTW @Radiance heb jij die Cyclops ombouw materiaal nog ergens? Jij had een vrij duidelijke tutorial, maar je site lijkt dood :-P.
Klopt, wegens drukte vergeten de domein opnieuw te verlengen en die is toen geregistreerd door een schoenen winkel, volgens mij een louche bedrijf ook.
Ik ben er mee bezig weer online te gaan want m'n Banggood credits raken op ook, die gingen erg hard met die tutorial.
Hij staat nu tijdelijk op https://hobbytweaks.directup.nl maar die naam is duf en moet veranderd worden.
[ Voor 8% gewijzigd door Radiance op 07-11-2017 17:33 ]
De app UAV Forecast is erg handig, geeft naast algemene weersomstandigheden onder andere windsnelheden op de verschillende hoogtes en zichtafstanden aan, zowel nu als een voorspelling. Tevens bevat de app een kaart met DJI NFZ's, etc. Erg handig, want onderweg op een mobiel apparaat de kaart van het Kadaster checken of je wel of niet in een no-fly zit, is haast onmogelijk.
Echter, de gebieden in de UAV Forecast app en op de site van het Kadaster komen helaas niet overeen. De UAV Forecast hanteert X kilometer rondom een airport, het Kadaster tekent (met name rondom Eindhoven Airport) en véél grote gebied. Ik wil me aan de regels houden, maar wel op een manier dat ik onderweg snel kan checken waar ik moet zijn om dat te doen. Me enkel laten leiden door de UAV Forecast is daarom niet juist...(?). Hoe gaan andere hiermee om?
Echter, de gebieden in de UAV Forecast app en op de site van het Kadaster komen helaas niet overeen. De UAV Forecast hanteert X kilometer rondom een airport, het Kadaster tekent (met name rondom Eindhoven Airport) en véél grote gebied. Ik wil me aan de regels houden, maar wel op een manier dat ik onderweg snel kan checken waar ik moet zijn om dat te doen. Me enkel laten leiden door de UAV Forecast is daarom niet juist...(?). Hoe gaan andere hiermee om?
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Leuke pagina! Vanavond ff kijkuh...Radiance schreef op dinsdag 7 november 2017 @ 13:22:
[...]
Hij staat nu tijdelijk op https://hobbytweaks.directup.nl maar die naam is duf en moet veranderd worden.
Locatie uitzoeken en van te voren uitzoeken of je daar mag vliegen. Overigens kan je in UAV Forecast de straal van de No-Fly zone zelf aanpassen. Die van Airport Eindhoven kan je dus ook groter maken zodat hij wat meer klopt.JBS schreef op dinsdag 7 november 2017 @ 14:25:
De app UAV Forecast is erg handig, geeft naast algemene weersomstandigheden onder andere windsnelheden op de verschillende hoogtes en zichtafstanden aan, zowel nu als een voorspelling. Tevens bevat de app een kaart met DJI NFZ's, etc. Erg handig, want onderweg op een mobiel apparaat de kaart van het Kadaster checken of je wel of niet in een no-fly zit, is haast onmogelijk.
Echter, de gebieden in de UAV Forecast app en op de site van het Kadaster komen helaas niet overeen. De UAV Forecast hanteert X kilometer rondom een airport, het Kadaster tekent (met name rondom Eindhoven Airport) en véél grote gebied. Ik wil me aan de regels houden, maar wel op een manier dat ik onderweg snel kan checken waar ik moet zijn om dat te doen. Me enkel laten leiden door de UAV Forecast is daarom niet juist...(?). Hoe gaan andere hiermee om?
[ Voor 70% gewijzigd door ChojinZ op 07-11-2017 17:05 ]
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- foekie01
- Registratie: December 2012
- Laatst online: 17-07-2024
Allemaal heel hartelijk bedankt voor de reacties!
Ik zat dus met mijn vermoeden niet verkeerd. Ik gok dat het veelal "gewoon doen" is.
Ik ben me bewust van de papieren en regels, maar dat wilt niet zeggen dat men er zich aan houd
Maar hoe zit dat nou met zo'n DJI? Ik dacht altijd vernomen te hebben dat zo'n ding gewoon niet de lucht in gaat in no-fly, is dat ook zou of heb ik dat fout begrepen?
Gebruiken zo'n bedrijven nou veelal DJI of andere merken/zelfbouw?
Ik zat dus met mijn vermoeden niet verkeerd. Ik gok dat het veelal "gewoon doen" is.
Ik ben me bewust van de papieren en regels, maar dat wilt niet zeggen dat men er zich aan houd
Maar hoe zit dat nou met zo'n DJI? Ik dacht altijd vernomen te hebben dat zo'n ding gewoon niet de lucht in gaat in no-fly, is dat ook zou of heb ik dat fout begrepen?
Gebruiken zo'n bedrijven nou veelal DJI of andere merken/zelfbouw?
[ Voor 11% gewijzigd door foekie01 op 07-11-2017 18:49 ]
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
In princiepe wel maar dat is relatief makkelijk te omzeilen. Je kan die beveiligingsmaatregelen uitzetten. Meen mij ter herinneren dat ze dat met een aangepaste firmware deden.foekie01 schreef op dinsdag 7 november 2017 @ 18:49:
Maar hoe zit dat nou met zo'n DJI? Ik dacht altijd vernomen te hebben dat zo'n ding gewoon niet de lucht in gaat in no-fly, is dat ook zou of heb ik dat fout begrepen?
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
Zonder instellingen hieromtrent te hebben aangepast, krijg je in de DJI app een waarschuwing over de omgevingsklasse waarin je je bevindt. Accepteer je die, dan kun je gewoon opstijgen.ChojinZ schreef op dinsdag 7 november 2017 @ 19:06:
[...]
In princiepe wel maar dat is relatief makkelijk te omzeilen. Je kan die beveiligingsmaatregelen uitzetten. Meen mij ter herinneren dat ze dat met een aangepaste firmware deden.
(Mavic Pro met laatste firmware en laatste officiële DJI Go 4 app)
[ Voor 6% gewijzigd door JBS op 07-11-2017 20:14 ]
- foekie01
- Registratie: December 2012
- Laatst online: 17-07-2024
Ik dacht altijd dat het gewoon niet kon, maar je bent als gebruiker dus nog steeds in controle. Op zich natuurlijk heel fijn, alleen kan iedereen nu alsnog overal vliegen.JBS schreef op dinsdag 7 november 2017 @ 19:56:
[...]
Zonder instellingen hieromtrent te hebben aangepast, krijg je in de DJI app een waarschuwing over de omgevingsklasse waarin je je bevindt. Accepteer je die, dan kun je gewoon opstijgen.
(Mavic Pro met laatste firmware en laatste officiële DJI Go 4 app)
Bedankt voor de info allemaal
Late reactie van mijKars schreef op maandag 23 oktober 2017 @ 16:59:
[...]
Wel balen van je Lizard, ik gok op een kapotte 4-in-1 ESC... Meestal is Banggood wel vlot en correct met de afhandeling.
Doet het beeld via de FPV-camera het wel?
Even op je transmitter inhaken; bij zelfbouw kun je kiezen welke receiver je erin wil, dus maakt het protocol niet veel uit.
Bij ARF / BNF modellen kun je vaak ook kiezen welke receiver je wil (FASST/FlySky/DSMX/FrSky).
Ja, camera doet het. Het probleem zit hem in motor 2. Die reageert wel maar draait niet (of nauwelijks).
Inmiddels ben ik er met BangGood goed uitgekomen. Een nieuwe Lizard95 is onderweg.
Iemand interesse in een Lizard 95 met problemen?
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Stuur maar op!Bugs3 schreef op donderdag 9 november 2017 @ 15:47:
[...]
Late reactie van mij
Ja, camera doet het. Het probleem zit hem in motor 2. Die reageert wel maar draait niet (of nauwelijks).
Inmiddels ben ik er met BangGood goed uitgekomen. Een nieuwe Lizard95 is onderweg.
Iemand interesse in een Lizard 95 met problemen?
1-7-4-10-2-8-6-12-3-9-5-11
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Ik meld me ook aan!Bugs3 schreef op donderdag 9 november 2017 @ 15:47:
[...]
Iemand interesse in een Lizard 95 met problemen?
Desnoods kunnen we ruilen. Ik heb nog watr brushed spul liggen waar ik niets meer mee doe (Lipo's, frame-pjes, motoren, FC, etc) mocht je interesse hebben...
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
Duh..... Voor niks gaat de zon op 
Er zitten natuurlijk een hoop reserve onderdelen in (minimaal 3 bruikbare motoren) dus verwacht er wel wat voor terug op financieel gebied.
Er zitten natuurlijk een hoop reserve onderdelen in (minimaal 3 bruikbare motoren) dus verwacht er wel wat voor terug op financieel gebied.
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Als ik jou was zou ik de Lizard zelf bewaren voor onderdelen 😃
1-7-4-10-2-8-6-12-3-9-5-11
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Ergens ben ik het wel met je eens. Maar dan moet je wel op korte termijn wat doen met die onderdelen. De quad ontwikkelingen gaan zo snel dat, wanneer je wat een jaartje op de plak hebt liggen, het eigenlijk niet meer interessant is om er wat mee te doen.Kars schreef op donderdag 9 november 2017 @ 16:12:
Als ik jou was zou ik de Lizard zelf bewaren voor onderdelen 😃
Zelf kom ik om in de spare parts waar ik niets meer mee gaan doen. Kheb nog een Naze32 liggen. En 12amp ESC's (pre-multishot/oneshot). Eachine Racer 250 VTX, props waar ik niets meer mee doe....
Nu kan ik wel een quad bouwen met oude onderdelen maar ik weet nu al dat dat minder lekker zal vliegen als mijn main quad en dus zal dat ding waarschijnlijk stof gaan happen.
Soms zou ik wel willen dat de ontwikkelingen allemaal wat minder hard gingen...
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
Dat lijkt me eigenlijk wel het beste. Weet bij god niet wat ik er voor zou moeten vragen. En als wannebee droner is dit wel leuk om mee te experimenteren met onder ander BetaFlight.Kars schreef op donderdag 9 november 2017 @ 16:12:
Als ik jou was zou ik de Lizard zelf bewaren voor onderdelen 😃
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Gisteren werd de Runcam Swift Micro met een ATX03 bezorgd en vrijdag kwamen er wat onderdelen binnen om mijn 3d printer weer aan de gang te krijgen dus had een leuk hobby weekend met dat bagger weer.
Nadat de printer weer werkte direct een mount geprint om de Runcam op de Lizard te kunnen mounten.
Ik heb ook direct een plaatje voor de onderkant geprint zodat de batterij niet op de standoffs rust en er gewoon een stukje klittenband op kan zodat de batterij goed stevig blijft zitten.
Met de bedrading ging het echter nog wel even mis want op de product pagina van Banggood staan de 5v out en de input kabel verkeerd om bij de ATX03. Na een kijkje in de handleiding van de ATX03 kwam ik hier pas achter dus de boel weer omgegooid en nu werkt alles.
Heb er alleen niet bij stil gestaan dat er geen OSD kabel wordt meegeleverd met de Runcam dus die moet ik nog maar even bestellen.
Nu is het afwachten op beter weer zodat ik eens kan vliegen met de Lizard.
Nadat de printer weer werkte direct een mount geprint om de Runcam op de Lizard te kunnen mounten.
Ik heb ook direct een plaatje voor de onderkant geprint zodat de batterij niet op de standoffs rust en er gewoon een stukje klittenband op kan zodat de batterij goed stevig blijft zitten.
Met de bedrading ging het echter nog wel even mis want op de product pagina van Banggood staan de 5v out en de input kabel verkeerd om bij de ATX03. Na een kijkje in de handleiding van de ATX03 kwam ik hier pas achter dus de boel weer omgegooid en nu werkt alles.
Heb er alleen niet bij stil gestaan dat er geen OSD kabel wordt meegeleverd met de Runcam dus die moet ik nog maar even bestellen.
Nu is het afwachten op beter weer zodat ik eens kan vliegen met de Lizard.
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Iemand nog interesse in gratis 5' en 3' props?
Ik heb hier nog wat props liggen waar ik niets meer mee doe. De kwaliteit is matig. Ze zijn redelijk zwaar en niet heel erg gebalanceerd. Maar het vliegt allemaal wel redelijk en ze zijn ideaal voor de beginner (veel crashen word dan een stuk goedkoper ).
Zover ik mij kan herinneren zijn alle props van King Kong. Ik vraag slechts 1 euro, maar dat is voor de verzendkosten.
https://tweakers.net/ext/f/WHe4eV0bmFIjNML0p3NBDX7Q/full.jpg
Dus... interesse? Stuur ff een berichtje.
Iedereen mag reageren maar ik vermoed dat ik de meeste veteranen hier ze beter links kunnen laten liggen.
Ik heb hier nog wat props liggen waar ik niets meer mee doe. De kwaliteit is matig. Ze zijn redelijk zwaar en niet heel erg gebalanceerd. Maar het vliegt allemaal wel redelijk en ze zijn ideaal voor de beginner (veel crashen word dan een stuk goedkoper
Zover ik mij kan herinneren zijn alle props van King Kong. Ik vraag slechts 1 euro, maar dat is voor de verzendkosten.
https://tweakers.net/ext/f/WHe4eV0bmFIjNML0p3NBDX7Q/full.jpg
{kind=link}
Dus... interesse? Stuur ff een berichtje.
Iedereen mag reageren maar ik vermoed dat ik de meeste veteranen hier ze beter links kunnen laten liggen.
[ Voor 4% gewijzigd door ChojinZ op 13-11-2017 20:17 ]
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
Ik heb nog zoveel KingKong props liggen en als ik nieuwe nodig heb bestel ik ze weer hoewel ik dan voor stillere wil gaan. Iemand tips?
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Ik ben zelf ook gestart met King Kong en DYS props. Voor een beginner is daar niets mis mee. Ze zijn erg stevig en relatief goedkoop en, zeker als je veel crashed, is dat een groot voordeel.BoAC schreef op maandag 13 november 2017 @ 20:34:
Ik heb nog zoveel KingKong props liggen en als ik nieuwe nodig heb bestel ik ze weer hoewel ik dan voor stillere wil gaan. Iemand tips?
Maar hoe beter je word met vliegen, hoe meer je het verschil merkt tussen matig props en goede props. Ik vlieg nu met DAL, Gemfan en HQ en dat is toch ff andere koek. Je quad is sneller, wendbaarder en veel efficienter. Ze breken wel een stuk sneller maar dat is voor mij nu een minder groot probleem dan voorheen, simpelweg omdat ik minder crash.
Overigens zie ik ook verschil in mij HD footage. Alles lijkt net ff wat smoother over te komen.
Momenteel vlieg ik met de HQ 5x4.3x3 V1S. Zijn niet goedkoop maar ow, wat vliegen ze goed!
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Ik gebruik zelf deze sinds een tijdje: GEPRC 5040. Naar mijn mening dezelfde voordelen als de KingKong 5040;
- Cheap
- Sterk
- Goed gebalanceerd
Alleen hebben deze als extra voordeel; een dikker hubje, iets wat nodig is op mijn Cobra motoren. En echt ultra smooth hoor.
Ten opzichte van de hierboven genoemde props zijn deze volgens mij iets zwaarder en daardoor spinnen ze marginaal langzamer op. Echter vallen ze niet uit elkaar wanneer je ernaar kijkt en dat is voor mij, zeker in het winterseizoen, erg fijn... Ik crash wel eens
- Cheap
- Sterk
- Goed gebalanceerd
Alleen hebben deze als extra voordeel; een dikker hubje, iets wat nodig is op mijn Cobra motoren. En echt ultra smooth hoor.
Ten opzichte van de hierboven genoemde props zijn deze volgens mij iets zwaarder en daardoor spinnen ze marginaal langzamer op. Echter vallen ze niet uit elkaar wanneer je ernaar kijkt
- Steeldunes
- Registratie: Maart 2014
- Laatst online: 30-03 15:14
:strip_exif()/u/587955/ezgif-2208001241.gif?f=community)
2 weekenden terug mijn indoor beestje gemaakt! De PepperFiish.
Damn wat is dat ding leuk om te vliegen. 30gr zoals ie op de foto staat, 47gr met lipo

Hoe het vliegt? ShaggyFPV demonstreert:
Damn wat is dat ding leuk om te vliegen. 30gr zoals ie op de foto staat, 47gr met lipo

Hoe het vliegt? ShaggyFPV demonstreert:
Saying "um" is the human equivalent of buffering...
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
En je FPV antenne al een paar keer krom gevlogen?Steeldunes schreef op dinsdag 14 november 2017 @ 23:13:
2 weekenden terug mijn indoor beestje gemaakt! De PepperFiish.
Damn wat is dat ding leuk om te vliegen. 30gr zoals ie op de foto staat, 47gr met lipo
[afbeelding]
Hoe het vliegt? ShaggyFPV demonstreert:
[video]
- Steeldunes
- Registratie: Maart 2014
- Laatst online: 30-03 15:14
Ja zeker! Nog even kijken hoe lang die het volhoudt. Zat standaard al op de cam. Stond sowieso op de planning om er een pigtail op te zetten.BoAC schreef op woensdag 15 november 2017 @ 08:00:
[...]
En je FPV antenne al een paar keer krom gevlogen?
Saying "um" is the human equivalent of buffering...
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Iemand hier toevallig dit prachtige ding gepreordered? Ik was zelf helaas te laat.
Weet iemand waar ik hier in NL Lipo batterijen 3.7v ca. 250mah met JST PH2.0 connector kan kopen?
Ik vind ze wel op Amazon maar die versturen het niet naar NL. Op Alie, BangGood en Gearbest kan ik ze niet vinden.
Ik vind ze wel op Amazon maar die versturen het niet naar NL. Op Alie, BangGood en Gearbest kan ik ze niet vinden.
- Neyluzz
- Registratie: Oktober 2009
- Laatst online: 13-05 22:02
$289 voor een receiver? Hell noSensei_D schreef op woensdag 15 november 2017 @ 09:09:
Iemand hier toevallig dit prachtige ding gepreordered? Ik was zelf helaas te laat.
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
Ik zie $65.24
En nee. ik niet. Past niet in een SkyZone
- Neyluzz
- Registratie: Oktober 2009
- Laatst online: 13-05 22:02
Dat is een preorder depositBoAC schreef op woensdag 15 november 2017 @ 20:00:
[...]
Ik zie $65.24
En nee. ik niet. Past niet in een SkyZone
- lasharor
- Registratie: December 2004
- Laatst online: 13-05 12:32
7 december 2004
Er zit een fan in voor je receiver? Hoe goed is voor de levensduur van de bril? Lijkt mij dat dit hele ding best wel veel energie verbruikt en dus redelijk belastend is voor je bril..
Ik heb mylipo.de gevonden en de benodigde spullen besteld.Bugs3 schreef op woensdag 15 november 2017 @ 18:59:
Weet iemand waar ik hier in NL Lipo batterijen 3.7v ca. 250mah met JST PH2.0 connector kan kopen?
Ik vind ze wel op Amazon maar die versturen het niet naar NL. Op Alie, BangGood en Gearbest kan ik ze niet vinden.
De bedoeling is om de stekker van de batterijen te vervangen. Nu wordt er bij de KingKong Tiny 6 gebruik gemaakt van een jst 1.25mm aansluiting. Je voelt na een minuut gewoon de power verdwijnen. Met een 2.0mm aansluiting schijnt het beter te gaan. Ik ga het proberen in ieder geval.
Ben op het idee gekomen door Micro Motor Warehouse. Bij de Inductrix schijnt de 1,25mm stekker ook een bron van ergernis te zijn met als gevolg dat deze vaak vervangen wordt door de 2.0mm. Snap niet dat ze dat dan niet standaard doen
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Goeie gast, die heeft mij destijds geholpen met nieuwe motoren voor de Latrax Alias.
Heeft veel zaken en kennis voor brushed en micro drones.
1-7-4-10-2-8-6-12-3-9-5-11
Ik lach me kapot om zijn YT filmpjes. Hij komt over als één of andere psychopaat die je niet in het donker tegen moet komenKars schreef op donderdag 16 november 2017 @ 12:36:
[...]
Goeie gast, die heeft mij destijds geholpen met nieuwe motoren voor de Latrax Alias.
Heeft veel zaken en kennis voor brushed en micro drones.
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Zijn mensen hier bekend met ClearView eigenlijk? Ik zou er wel $289 voor over hebben
Voorbeeldje van ClearView
Dit is wel een goeie vraag. Ik zag dezelfde vraag ook op de facebook page van de makers. Helaas nog niet beantwoord, dat zegt soms genoeglasharor schreef op woensdag 15 november 2017 @ 20:05:
Er zit een fan in voor je receiver? Hoe goed is voor de levensduur van de bril? Lijkt mij dat dit hele ding best wel veel energie verbruikt en dus redelijk belastend is voor je bril..
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Ik vlieg nu met een Attitude 4 maar volgens mij heb ik meer baat bij een upgrade naar een hoger model goggles dan naar een betere receiver.Sensei_D schreef op donderdag 16 november 2017 @ 13:22:
[...]
Zijn mensen hier bekend met ClearView eigenlijk? Ik zou er wel $289 voor over hebbenDe huidge prijs van €439 vind ik te hoog en dan heb je nog een losse receiver ook, dus verplicht tripod/paaltje.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- kevin303
- Registratie: April 2008
- Laatst online: 04-02 21:33
Ik vlieg ook met een attitude 4 . Het was wel even wennen met een mindere FOV dan mijn quanum V2 box goggles. Het laag over de grond vliegen was moeilijker met de fatshark. Nu gaat het wel al beter.ChojinZ schreef op donderdag 16 november 2017 @ 15:32:
[...]
Ik vlieg nu met een Attitude 4 maar volgens mij heb ik meer baat bij een upgrade naar een hoger model goggles dan naar een betere receiver.
Snap trouwens niet waarom alleen de dure high end brillen een betere field of view hebben. Is het niet gewoon kwestie van de schermpjes wat dichter bij de ogen te brengen ? Toch best tevreden van mijn attidude 4 voor 260 euro bij banggood
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Als die ClearView module in de attitudes passen dan ben ik het niet met je eens hoor. Met een hogere klasse goggles krijg je marginaal meer maar moet je compleet nieuwe goggles. De ClearView module verbeterd het beeld in elke goggles waar die in past. En beeld is alles bij deze hobby. Ik geloof nog niet in HD, vtx en cams zijn duur en groot en micro/nano quads zijn dan niet eens een optie meer. Tot HD net zo klein wordt als analoog is het ClearView wat de kroont spant imhoChojinZ schreef op donderdag 16 november 2017 @ 15:32:
[...]
Ik vlieg nu met een Attitude 4 maar volgens mij heb ik meer baat bij een upgrade naar een hoger model goggles dan naar een betere receiver.
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Snap ik ook niet. Maar de prijs van Fatsharks is sowieso belachelijk hoog. De hardware is, op sommige receivers na, helemaal niet bijzonder. Service is daarentegen wel top! Zelf nog geen ervaring mee, maar ik lees enkel hele positieve verhalen.kevin303 schreef op donderdag 16 november 2017 @ 18:47:
[...]
Snap trouwens niet waarom alleen de dure high end brillen een betere field of view hebben. Is het niet gewoon kwestie van de schermpjes wat dichter bij de ogen te brengen ? Toch best tevreden van mijn attidude 4 voor 260 euro bij banggood
Attitude heeft niet alleen een lagere resolutie maar de FOV is ook een stuk kleiner. Het is dus niet alleen een kwaliteitsverbetering maar ook meer immersie. Lastige keuze, vooral gebasseerd op persoonlijke voorkeur, maar ik zou dan toch voor een HD versie gaan.Sensei_D schreef op donderdag 16 november 2017 @ 19:38:
[...]
Als die ClearView module in de attitudes passen dan ben ik het niet met je eens hoor. Met een hogere klasse goggles krijg je marginaal meer maar moet je compleet nieuwe goggles. De ClearView module verbeterd het beeld in elke goggles waar die in past. En beeld is alles bij deze hobby. Ik geloof nog niet in HD, vtx en cams zijn duur en groot en micro/nano quads zijn dan niet eens een optie meer. Tot HD net zo klein wordt als analoog is het ClearView wat de kroont spant imho
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Je doelt op de HD3? Sure, die heeft idd wat meer resolutie en zeker meer FOV, maar attitudes zijn echt niet verkeerd hoor. Heb zelf Domi V3 en dat is eigenlijk de 16:9 versie van de Attitudes v4 en de keuze tussen ClearView en HD3 is voor mij heel snel gemaaktChojinZ schreef op donderdag 16 november 2017 @ 20:26:
[...]
Attitude heeft niet alleen een lagere resolutie maar de FOV is ook een stuk kleiner. Het is dus niet alleen een kwaliteitsverbetering maar ook meer immersie. Lastige keuze, vooral gebasseerd op persoonlijke voorkeur, maar ik zou dan toch voor een HD versie gaan.
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Gisteren waren alle parts er op de motoren na, die kwamen vandaag.
Het bouwen zelf ging vrij vlot maar het configureren van Betaflight lua scripts liep een beetje spaak.
Ik had gewoon de aanwijzingen van de Matek website gevolgd voor de F405 maar met soft serial werkte de scripts dus niet. Na wat rond zoeken heb ik smart port op de TX van UART 4 gesoldeerd want had toch al een draadje op de inverted pad van de R XSR gesoldeerd. Daarna werkte het direct.
Ook had ik de F405 verkeerd om geïnstalleerd omdat dit beter uit kwam met de bedrading van de VTX en RX dus moest de motor volgorde aanpassen in de CLI maar dat was best simpel met de tutorial van Joshua Bardwell op YouTube.
Wat ik wel jammer vind is dat je de settings van de Split niet kunt aanpassen via de TX. Je kan wel het OSD menu openen maar de controls gaan via de knopjes op de zijkant van het bord, gemiste kans imo zeker omdat er nu voor andere camera's de optie is om de OSD wel te bedienen via Betaflight.
Video opname starten en stoppen werkt dan wel weer prima via de TX en er gaat dan een rode dot knipperen in de OSD zodat je weet dat ie opneemt dus dat is wel handig.
Omdat ik her en der gelezen had dat de F405 last heeft van ESC noise en de Racerstar Tattoo Blijven heli 32 ESC nogal veel noise hebben, heb ik de meegeleverde condensatoren op de ESC power leads gesoldeerd. In rust is het beeld in ieder geval erg scherp maar heb nog niet kunnen vliegen, dat hoop ik morgen te gaan doen.
De OSD van Betaflight zelf vind ik ideaal in ieder geval al heb ik RSSI nog niet aan de praat gekregen.
Ook de lua scripts om instellingen van de FC te wijzigen zijn een uitkomst! De laatste versie van de scripts werkte niet direct maar na wat rebooten werkte het ineens. Ik had al een issue geopend op GitHub en het lijkt er op dat de sensor check niet altijd even goed werkt. Een aantal devs pikte het snel op in ieder geval en er word aan een verbetering gewerkt zag ik en mijn foutmelding staat nu gerapporteerd als bug al werkt het nu dus wel.
Ik heb tijdens het bouwen wel wat foto's gemaakt maar niet genoeg voor een echte build log helaas. Misschien dat ik die foto's nog eens maak als ik het frame weer open moet maken.
Anyway, dit is het resultaat geworden.

Gewicht: 408g zonder batterij
Frame: Realacc X5R
Motoren: Emax RS2306
ESC: Racerstar Tattoo 30a
FC/PDB: Matek F405 AIO
FPV/HD cam: Runcam Split 2
RX: FrSky R-XSR
VTX: Eachine VTX526
Props: Kingkong 5x4.5x3
Alles zit met softmount standoffs op get frame vast.
Ben reuze benieuwd hoe ie gaat vliegen.
Alles staat goed ingesteld dus als het weer het morgen toe laat gaat ie de lucht in.
Ik ben wel nog bezig met een plaatje ontwerpen om de batterij op te leggen bovenop het frame. Heb in het verleden al vaker gehad dat de kop van een schroefje een batterij beschadigd en dat wil ik voorkomen met zo'n plaatje. Had er eentje gedownload voor de Lizard maar is helaas niet te vinden voor dit frame dus ben zelf maar aan het ontwerpen gegaan. Echter klopte de afmetingen van mijn eerste ontwerp niet helemaal dus ga het morgen nog maar eens proberen.
Voor nu plak ik van die pads voor onder stoel poten op de schroefjes.
Het bouwen zelf ging vrij vlot maar het configureren van Betaflight lua scripts liep een beetje spaak.
Ik had gewoon de aanwijzingen van de Matek website gevolgd voor de F405 maar met soft serial werkte de scripts dus niet. Na wat rond zoeken heb ik smart port op de TX van UART 4 gesoldeerd want had toch al een draadje op de inverted pad van de R XSR gesoldeerd. Daarna werkte het direct.
Ook had ik de F405 verkeerd om geïnstalleerd omdat dit beter uit kwam met de bedrading van de VTX en RX dus moest de motor volgorde aanpassen in de CLI maar dat was best simpel met de tutorial van Joshua Bardwell op YouTube.
Wat ik wel jammer vind is dat je de settings van de Split niet kunt aanpassen via de TX. Je kan wel het OSD menu openen maar de controls gaan via de knopjes op de zijkant van het bord, gemiste kans imo zeker omdat er nu voor andere camera's de optie is om de OSD wel te bedienen via Betaflight.
Video opname starten en stoppen werkt dan wel weer prima via de TX en er gaat dan een rode dot knipperen in de OSD zodat je weet dat ie opneemt dus dat is wel handig.
Omdat ik her en der gelezen had dat de F405 last heeft van ESC noise en de Racerstar Tattoo Blijven heli 32 ESC nogal veel noise hebben, heb ik de meegeleverde condensatoren op de ESC power leads gesoldeerd. In rust is het beeld in ieder geval erg scherp maar heb nog niet kunnen vliegen, dat hoop ik morgen te gaan doen.
De OSD van Betaflight zelf vind ik ideaal in ieder geval al heb ik RSSI nog niet aan de praat gekregen.
Ook de lua scripts om instellingen van de FC te wijzigen zijn een uitkomst! De laatste versie van de scripts werkte niet direct maar na wat rebooten werkte het ineens. Ik had al een issue geopend op GitHub en het lijkt er op dat de sensor check niet altijd even goed werkt. Een aantal devs pikte het snel op in ieder geval en er word aan een verbetering gewerkt zag ik en mijn foutmelding staat nu gerapporteerd als bug al werkt het nu dus wel.
Ik heb tijdens het bouwen wel wat foto's gemaakt maar niet genoeg voor een echte build log helaas. Misschien dat ik die foto's nog eens maak als ik het frame weer open moet maken.
Anyway, dit is het resultaat geworden.

Gewicht: 408g zonder batterij
Frame: Realacc X5R
Motoren: Emax RS2306
ESC: Racerstar Tattoo 30a
FC/PDB: Matek F405 AIO
FPV/HD cam: Runcam Split 2
RX: FrSky R-XSR
VTX: Eachine VTX526
Props: Kingkong 5x4.5x3
Alles zit met softmount standoffs op get frame vast.
Ben reuze benieuwd hoe ie gaat vliegen.
Alles staat goed ingesteld dus als het weer het morgen toe laat gaat ie de lucht in.
Ik ben wel nog bezig met een plaatje ontwerpen om de batterij op te leggen bovenop het frame. Heb in het verleden al vaker gehad dat de kop van een schroefje een batterij beschadigd en dat wil ik voorkomen met zo'n plaatje. Had er eentje gedownload voor de Lizard maar is helaas niet te vinden voor dit frame dus ben zelf maar aan het ontwerpen gegaan. Echter klopte de afmetingen van mijn eerste ontwerp niet helemaal dus ga het morgen nog maar eens proberen.
Voor nu plak ik van die pads voor onder stoel poten op de schroefjes.
[ Voor 8% gewijzigd door Radiance op 19-11-2017 11:05 ]
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Nice build! Nu alleen nog hopen dat het weer wat beter word zodat je em ook kan uittesten.Radiance schreef op zondag 19 november 2017 @ 02:15:
Gisteren waren alle parts er op de motoren na, die kwamen vandaag.
Het bouwen zelf ging vrij vlot maar het configureren van Betaflight lua scripts liep een beetje spaak.
Ik had gewoon de aanwijzingen van de Matek website gevolgd voor de F405 maar met soft serial werkte de scripts dus niet. Na wat rond zoeken heb ik smart port op de TX van UART 4 gesoldeerd want had toch al een draadje op de inverted pad van de R XSR gesoldeerd. Daarna werkte het direct.
Ook had ik de F405 verkeerd om geïnstalleerd omdat dit beter uit kwam met de bedrading van de VTX en RX dus moest de motor volgorde aanpassen in de CLI maar dat was best simpel met de tutorial van Joshua Bardwell op YouTube.
Wat ik wel jammer vind is dat je de settings van de Split niet kunt aanpassen via de TX. Je kan wel het OSD menu openen maar de controls gaan via de knopjes op de zijkant van het bord, gemiste kans imo zeker omdat er nu voor andere camera's de optie is om de OSD wel te bedienen via Betaflight.
Video opname starten en stoppen werkt dan wel weer prima via de TX en er gaat dan een rode dot knipperen in de OSD zodat je weet dat ie opneemt dus dat is wel handig.
Omdat ik her en der gelezen had dat de F405 last heeft van ESC noise en de Racerstar Tattoo Blijven heli 32 ESC nogal veel noise hebben, heb ik de meegeleverde condensatoren op de ESC power leads gesoldeerd. In rust is het beeld in ieder geval erg scherp maar heb nog niet kunnen vliegen, dat hoop ik morgen te gaan doen.
De OSD van Betaflight zelf vind ik ideaal in ieder geval al heb ik RSSI nog niet aan de praat gekregen.
Ook de lua scripts om instellingen van de FC te wijzigen zijn een uitkomst! De laatste versie van de scripts werkte niet direct maar na wat rebooten werkte het ineens. Ik had al een issue geopend op GitHub en het lijkt er op dat de sensor check niet altijd even goed werkt. Een aantal devs pikte het snel op in ieder geval en er word aan een verbetering gewerkt zag ik en mijn foutmelding staat nu gerapporteerd als bug al werkt het nu dus wel.
Ik heb tijdens het bouwen wel wat foto's gemaakt maar niet genoeg voor een echte build log helaas. Misschien dat ik die foto's nog eens maak als ik het frame weer open moet maken.
Anyway, dit is het resultaat geworden.
[afbeelding]
Gewicht: 408g zonder batterij
Frame: Realacc X5R
Motoren: Emax RS2306
ESC: Racerstar Tattoo 30a
FC/PDB: Matek F405 AIO
FPV/HD cam: Runcam Split 2
RX: FrSky R-XSR
VTX: Eachine VTX526
Props: Kingkong 5x4.5x3
Alles zit met softmount standoffs op get frame vast.
Ben reuze benieuwd hoe ie gaat vliegen.
Alles staat goed ingesteld dus als het weer het morgen toe laat gaat ie de lucht in.
Ik ben wel nog bezig met een plaatje ontwerpen om de batterij op te leggen bovenop het frame. Heb in het verleden al vaker gehad dat de kop van een schroefje een batterij beschadigd en dat wil ik voorkomen met zo'n plaatje. Had er eentje gedownload voor de Lizard maar is helaas niet te vinden voor dit frame dus ben zelf maar aan het ontwerpen gegaan. Echter klopte de afmetingen van mijn eerste ontwerp niet helemaal dus ga het morgen nog maar eens proberen.
Voor nu plak ik van die pads voor onder stoel poten op de schroefjes.
Ik zou persoonlijk wel die ESC solderpads afdekken. Nu liggen ze open en bloot. Een nat grasprietje kan dan al problemen opleveren. En zeker met dat winter weer gaan we weer veel last van vocht krijgen.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- Radiance
- Registratie: April 2005
- Laatst online: 07-05 23:43
Ik heb net even gevlogen. Die solderpads moet ik inderdaad nog even afplakken. Ik had geen krimpkous meer die over het geheel geen paste helaas maar wat tape werkt ook wel.
Eerste indruk, hij is snel, heel erg snel haha.
Hij voelt ook een stuk gevoeliger aan maar dat zal een kwestie van tunen zijn en wennen. Ik durfde er nu nog niet echt vol gas mee te vliegen in ieder geval.
Het beeld van de Runcam Split is erg mooi trouwens en scherp al zag ik wel wat trillingen in de camera. Ik moet nog even uitzoeken waar dat vandaan komt maar het waaide ook best stevig dus kan ook gewoon de wind zijn die vat op de quad kreeg. Ik had er namelijk niet constant last van.
Heb ook voor het eerst met de Lizard gevlogen en die is ook echt snel maar reageert een beetje raar vind ik. Denk dat ik daar maar PID settings voor ga zoeken die aardig werken want hij is zo slecht te vliegen. Na een milde crash schiet hij ook in failsafe als ik de quad arm dus ga zo maar even kijken wat er loos is.
Eerste indruk, hij is snel, heel erg snel haha.
Hij voelt ook een stuk gevoeliger aan maar dat zal een kwestie van tunen zijn en wennen. Ik durfde er nu nog niet echt vol gas mee te vliegen in ieder geval.
Het beeld van de Runcam Split is erg mooi trouwens en scherp al zag ik wel wat trillingen in de camera. Ik moet nog even uitzoeken waar dat vandaan komt maar het waaide ook best stevig dus kan ook gewoon de wind zijn die vat op de quad kreeg. Ik had er namelijk niet constant last van.
Heb ook voor het eerst met de Lizard gevlogen en die is ook echt snel maar reageert een beetje raar vind ik. Denk dat ik daar maar PID settings voor ga zoeken die aardig werken want hij is zo slecht te vliegen. Na een milde crash schiet hij ook in failsafe als ik de quad arm dus ga zo maar even kijken wat er loos is.
- Mielmania
- Registratie: Februari 2004
- Laatst online: 10-05 18:14
Gave build! Check even die Runcam Split 2 en hoe je hem aangesloten hebt, ik geloof dat je via de usb poort minder trillingen hebt dan via de soldeerpads (kijk ook even RCschim's youtube filmpje hierover).
Even een vraag waar ik lastig uit komt na lang zoeken. Ik wil een racer bouwen maar wel eentje met Inav zdoat ik ook leuke mp achtige dingen kan. Nou loop ik tegen het volgende dillema aan:
Ik wil een PDB die flink wat vermogen kan hebben (max 30A is krap).
Ik wil een voltage meter voor mijn OSD.
Ook wil ik een barometer voor Inav en als laast;
Het moet niet teveel kosten.
Nou kom ik op de volgende constructie uit:
Een Omnibus F4 V3 (rond 15 euro op Gearbest/Aliexpress)
Met een Matek FCHUB-6S die 4x30A levert (max 46A per kanaal) ( 9 euro bij BG)
Echter zijn er een hoop haken en ogen:
Liever wil ik een PDB die meer aankan zoals bijv. de GEPRC XT60-PDB die 4x50A heeft.
Maar die heeft weer geen ingebouwde voltage meter.
Dan kan je overstappen op de F4 PRO v2 ( rond de 14 euro) die wel een aansluittab heeft voor de batterij(voltage) en daarbij dus de voltage meter.
Maar ik lees dat er toch wat bugfixes zitten in de V3 versie over de V2 versie.
Ook kan ik opzoek naar een F4 PRO v3 maar die zijn een stuk duurder en lastig leverbaar.
Ook heb ik gekeken naar een HGLRC F4 V5 PRO (30 euro) met alles ineen, maar die heeft dan weer geen barometer
Mijn vragen zijn dan ook: Is de F4 V2 merkbaar beter dan de F4 V3?
Want als het niet uitmaakt neem ik liever een F4 Pro v2 met die GEPRC XT60-PDB en ben ik het goedkoopst uit.
Even een vraag waar ik lastig uit komt na lang zoeken. Ik wil een racer bouwen maar wel eentje met Inav zdoat ik ook leuke mp achtige dingen kan. Nou loop ik tegen het volgende dillema aan:
Ik wil een PDB die flink wat vermogen kan hebben (max 30A is krap).
Ik wil een voltage meter voor mijn OSD.
Ook wil ik een barometer voor Inav en als laast;
Het moet niet teveel kosten.
Nou kom ik op de volgende constructie uit:
Een Omnibus F4 V3 (rond 15 euro op Gearbest/Aliexpress)
Met een Matek FCHUB-6S die 4x30A levert (max 46A per kanaal) ( 9 euro bij BG)
Echter zijn er een hoop haken en ogen:
Liever wil ik een PDB die meer aankan zoals bijv. de GEPRC XT60-PDB die 4x50A heeft.
Maar die heeft weer geen ingebouwde voltage meter.
Dan kan je overstappen op de F4 PRO v2 ( rond de 14 euro) die wel een aansluittab heeft voor de batterij(voltage) en daarbij dus de voltage meter.
Maar ik lees dat er toch wat bugfixes zitten in de V3 versie over de V2 versie.
Ook kan ik opzoek naar een F4 PRO v3 maar die zijn een stuk duurder en lastig leverbaar.
Ook heb ik gekeken naar een HGLRC F4 V5 PRO (30 euro) met alles ineen, maar die heeft dan weer geen barometer
Mijn vragen zijn dan ook: Is de F4 V2 merkbaar beter dan de F4 V3?
Want als het niet uitmaakt neem ik liever een F4 Pro v2 met die GEPRC XT60-PDB en ben ik het goedkoopst uit.
[ Voor 3% gewijzigd door Mielmania op 19-11-2017 21:17 ]
hoi
Verwijderd
Ik zie dat ik nog wat dingen mis voor mijn beeld en zoek nu de spullen en het gereedschap om het te maken, maar ik kom er niet uit. Ik moet een kabel maken met aan 1 kant een JST-SH met 3 kabels en aan de andere kant een Molex Picoblade. Wat voor tang en pluggen etc. heb ik hier precies voor nodig? Liefst met een linkje naar bijv. Banggood.
Is zoiets ok?
https://eu.banggood.com/W...1184114.html?rmmds=search
Is zoiets ok?
https://eu.banggood.com/W...1184114.html?rmmds=search
- ChojinZ
- Registratie: September 2001
- Laatst online: 11-05 14:58
Ik heb een tijdje Inav gedraaid en, ook al is het hele geschikte software voor Aerial photography drones, voor racers is het toch eens stuk minder geschikt. Er missen flink wat filter optie's, out of te box zijn de PID settings een stuk slechter (maar dat kan je tunen), maar ook hele normale standaard settings uit Betaflight zie je niet terug in iNav.Mielmania schreef op zondag 19 november 2017 @ 21:15:
Gave build! Check even die Runcam Split 2 en hoe je hem aangesloten hebt, ik geloof dat je via de usb poort minder trillingen hebt dan via de soldeerpads (kijk ook even RCschim's youtube filmpje hierover).
Even een vraag waar ik lastig uit komt na lang zoeken. Ik wil een racer bouwen maar wel eentje met Inav zdoat ik ook leuke mp achtige dingen kan. Nou loop ik tegen het volgende dillema aan:
Ik wil een PDB die flink wat vermogen kan hebben (max 30A is krap).
Ik wil een voltage meter voor mijn OSD.
Ook wil ik een barometer voor Inav en als laast;
Het moet niet teveel kosten.
Nou kom ik op de volgende constructie uit:
Een Omnibus F4 V3 (rond 15 euro op Gearbest/Aliexpress)
Met een Matek FCHUB-6S die 4x30A levert (max 46A per kanaal) ( 9 euro bij BG)
Echter zijn er een hoop haken en ogen:
Liever wil ik een PDB die meer aankan zoals bijv. de GEPRC XT60-PDB die 4x50A heeft.
Maar die heeft weer geen ingebouwde voltage meter.
Dan kan je overstappen op de F4 PRO v2 ( rond de 14 euro) die wel een aansluittab heeft voor de batterij(voltage) en daarbij dus de voltage meter.
Maar ik lees dat er toch wat bugfixes zitten in de V3 versie over de V2 versie.
Ook kan ik opzoek naar een F4 PRO v3 maar die zijn een stuk duurder en lastig leverbaar.
Ook heb ik gekeken naar een HGLRC F4 V5 PRO (30 euro) met alles ineen, maar die heeft dan weer geen barometer
Mijn vragen zijn dan ook: Is de F4 V2 merkbaar beter dan de F4 V3?
Want als het niet uitmaakt neem ik liever een F4 Pro v2 met die GEPRC XT60-PDB en ben ik het goedkoopst uit.
30A ESC is voor Inav meer dan zat en zelf een beetje overkill. Zo snel zal je nooit gaan vliegen met iNav. Tenzij je een 6S met 9' blades drone gaat bouwen. Maar ik neem aan dat dit gewoon een standaard S4, 5' blade ding word, toch?
Sowieso ben ik wel benieuwd waarom je zulke zware ESC zou willen hebben.
Roland SP404 sampler te koop: https://gathering.tweakers.net/forum/list_messages/2089640
- NiGeLaToR
- Registratie: Maart 2000
- Laatst online: 09:24
Luister Kophi Podcast!
:strip_exif()/u/4143/crop673c629560e43_cropped.gif?f=community)
Even een hele andere vraag mbt regelgeving. Ik ben momenteel amateur drone piloot en laveer zo goed mogelijk tussen alle regels door om te kunnen vliegen zo nu en dan. Inmiddels krijg ik steeds meer zakelijke vragen en verzoeken om opdrachten te doen. Prima, ik orienteer me om m'n ROC Light te gaan halen, zodat ik dat ook kan gaan oppakken.
Een van de vragen is echter een aantal beelden te maken van mensen die iets uitbeelden op de grond. Nu kan dat ook prima door er niet letterlijk boven te gaan vliegen (want dat zou niet mogen), maar is mogelijk wel binnen de bebouwde kom. Volstaat het om een grasveld te zoeken waar de drone boven blijft en te zorgen dat hier niemand loopt? En hoe zit het met het verkrijgen van een vergunning voor zoiets, is daar al wet- en regelgeving voor? Stel dat die mensen die onder de drone staan allemaal aangeven dit niet erg te vinden en ik dus wél boven mensen zou vliegen - is dat überhaupt uitgesloten?
Wellicht komt het tijdens zo'n ROC Light cursus allemaal aan bod, maar buiten alle wet- en regelgeving kan ik hier nog niet zoveel over vinden (danwel: ik zoek op de verkeerde plekken).
Edit: ik vlieg met een Mavic en zie nu dat voor drones < 1kg weer net andere regels gelden dan voor 1-4 kg. Ik kan alleen nog nergens een uitputtend stappenplan vinden voor wat ik precies wél moet doen. Registratie bij de luchtvaartautoriteit (PH nummer deel) én een verzekering, maar geen ROC Light cursus?
Een van de vragen is echter een aantal beelden te maken van mensen die iets uitbeelden op de grond. Nu kan dat ook prima door er niet letterlijk boven te gaan vliegen (want dat zou niet mogen), maar is mogelijk wel binnen de bebouwde kom. Volstaat het om een grasveld te zoeken waar de drone boven blijft en te zorgen dat hier niemand loopt? En hoe zit het met het verkrijgen van een vergunning voor zoiets, is daar al wet- en regelgeving voor? Stel dat die mensen die onder de drone staan allemaal aangeven dit niet erg te vinden en ik dus wél boven mensen zou vliegen - is dat überhaupt uitgesloten?
Wellicht komt het tijdens zo'n ROC Light cursus allemaal aan bod, maar buiten alle wet- en regelgeving kan ik hier nog niet zoveel over vinden (danwel: ik zoek op de verkeerde plekken).
Edit: ik vlieg met een Mavic en zie nu dat voor drones < 1kg weer net andere regels gelden dan voor 1-4 kg. Ik kan alleen nog nergens een uitputtend stappenplan vinden voor wat ik precies wél moet doen. Registratie bij de luchtvaartautoriteit (PH nummer deel) én een verzekering, maar geen ROC Light cursus?
[ Voor 12% gewijzigd door NiGeLaToR op 20-11-2017 13:38 ]
KOPHI - Klagen Op Het Internet podcast. Luister hier! – Kophi E24 - 6Mio voor kromme beekjes, 50meter minder huizenbouw & AI = mount stupid.
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 13-05 22:51
Vant weekend weer een heerlijk avondje kunnen racen Ik raak altijd wel de controle kwijt als ik tegen anderen vlieg, heb ik gemerkt
En voor wie niet van DVR beelden houd, hier wat HD beelden van de avond, maar deze zijn een stukje rustiger
En voor wie niet van DVR beelden houd, hier wat HD beelden van de avond, maar deze zijn een stukje rustiger
De regels voor de ROC light ken ik niet, maar het is een misvatting dat je (als amateur) niet boven "de bebouwde kom" zou mogen vliegen. De specifieke wettekst is:NiGeLaToR schreef op maandag 20 november 2017 @ 13:11:
Een van de vragen is echter een aantal beelden te maken van mensen die iets uitbeelden op de grond. Nu kan dat ook prima door er niet letterlijk boven te gaan vliegen (want dat zou niet mogen), maar is mogelijk wel binnen de bebouwde kom. Volstaat het om een grasveld te zoeken waar de drone boven blijft en te zorgen dat hier niemand loopt? En hoe zit het met het verkrijgen van een vergunning voor zoiets, is daar al wet- en regelgeving voor? Stel dat die mensen die onder de drone staan allemaal aangeven dit niet erg te vinden en ik dus wél boven mensen zou vliegen - is dat überhaupt uitgesloten?
Je mag niet boven "mensenmenigten" of een "gebied met aaneengesloten bebouwing" vliegen. Het is helaas niet duidelijk wanneer iets een "menigte" is (2 mensen? 10 mensen? 100 mensen?) en wat een "gebied met aaneengesloten bebouwing" is (een woonwijk? een bos met één twee-onder-een-kap-woning erin? een woonwijk en het grasveld dat er naast ligt?).de vlucht wordt niet uitgevoerd boven gebieden met aaneengesloten bebouwing of kunstwerken, industrie- en havengebieden daaronder begrepen dan wel boven mensenmenigten of boven spoorlijnen of voor motorrijtuigen toegankelijke verharde openbare wegen, met uitzondering van wegen in 30 km-zones binnen de bebouwde kom en wegen in 60 km-gebieden buiten de bebouwde kom;
- NiGeLaToR
- Registratie: Maart 2000
- Laatst online: 09:24
Luister Kophi Podcast!
Ja ik ken die discussie en zie de dubbelzinigheid in de wet ook. Op sites zoals deze zijn ze er vrij duidelijk over qua interpretatie: niet binnen de bebouwde kom.Tom-Z schreef op maandag 20 november 2017 @ 13:38:
[...]
De regels voor de ROC light ken ik niet, maar het is een misvatting dat je (als amateur) niet boven "de bebouwde kom" zou mogen vliegen. De specifieke wettekst is:
[...]
Je mag niet boven "mensenmenigten" of een "gebied met aaneengesloten bebouwing" vliegen. Het is helaas niet duidelijk wanneer iets een "menigte" is (2 mensen? 10 mensen? 100 mensen?) en wat een "gebied met aaneengesloten bebouwing" is (een woonwijk? een bos met één twee-onder-een-kap-woning erin? een woonwijk en het grasveld dat er naast ligt?).
https://www.drones.nl/wetgeving
Maar je hebt gelijk als het niet letterlijk in de wettekst staat. Overigens kom je met gezond verstand nog steeds het verst. Niemand tot last zijn, niet boven tuinen hangen midden in de zomer en dat soort dingen. Ik heb voor m'n huis een veldje van 40x40 meter en gebruik dat in m'n eigen wijk als plek om boven te vliegen bijvoorbeeld. Geen aaneengesloten bebouwing, geen wegen, geen mensen, geen overlast.
Zit ik nog steeds met de vraag wat nodig is voor zakelijk gebruik van m'n <1kg Mavic - kan iemand me wellicht in een goede richting schuiven?
KOPHI - Klagen Op Het Internet podcast. Luister hier! – Kophi E24 - 6Mio voor kromme beekjes, 50meter minder huizenbouw & AI = mount stupid.
- Petertje750
- Registratie: November 2010
- Laatst online: 00:01
Met de winter dagen wil ik led op me dquad gaan prutsen en vroeg me af of Iemand hier al is met zo'n PDB met Led heeft lopen spelen? dquad standaard PDB er uit deze er in en klaar?
https://www.hqdrones.nl/e...with-single-row-led-strip
https://www.hqdrones.nl/e...with-single-row-led-strip
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
Inderdaad, zo simpel is het welPetertje750 schreef op maandag 20 november 2017 @ 14:01:
Met de winter dagen wil ik led op me dquad gaan prutsen en vroeg me af of Iemand hier al is met zo'n PDB met Led heeft lopen spelen? dquad standaard PDB er uit deze er in en klaar?
https://www.hqdrones.nl/e...with-single-row-led-strip
Je kan deze dan ook aan je FC knopen en via bijv. Betaflight configureren.
Heb toevallig vorige week een 5V PDB gemaakt voor mijn F450, waar LED's onder de armen zijn gekomen.
Dan ziet die PDB met LED strips er wel iets beter uit
[ Voor 6% gewijzigd door Kars op 20-11-2017 16:05 ]
1-7-4-10-2-8-6-12-3-9-5-11
- Mielmania
- Registratie: Februari 2004
- Laatst online: 10-05 18:14
Ja ik wil een soort hybride, dus 3S/4S erin en cruisen en in een later stadium 5S erin en de boel eens flink afjanken. Vind dit geniaal: YouTube: Robocat 270 custom build on 5s very fastChojinZ schreef op maandag 20 november 2017 @ 10:45:
[...]
Ik heb een tijdje Inav gedraaid en, ook al is het hele geschikte software voor Aerial photography drones, voor racers is het toch eens stuk minder geschikt. Er missen flink wat filter optie's, out of te box zijn de PID settings een stuk slechter (maar dat kan je tunen), maar ook hele normale standaard settings uit Betaflight zie je niet terug in iNav.
30A ESC is voor Inav meer dan zat en zelf een beetje overkill. Zo snel zal je nooit gaan vliegen met iNav. Tenzij je een 6S met 9' blades drone gaat bouwen. Maar ik neem aan dat dit gewoon een standaard S4, 5' blade ding word, toch?
Sowieso ben ik wel benieuwd waarom je zulke zware ESC zou willen hebben.
hoi
- BoAC
- Registratie: Februari 2003
- Laatst online: 08:34
Heb je al eens drone gevlogen? Zo niet, begin lekker rustig. Na 4 builds kun je eens na gaan denken over een dergelijke build met veel powerMielmania schreef op maandag 20 november 2017 @ 20:13:
[...]
Ja ik wil een soort hybride, dus 3S/4S erin en cruisen en in een later stadium 5S erin en de boel eens flink afjanken. Vind dit geniaal: YouTube: Robocat 270 custom build on 5s very fast
- DutchWalnut
- Registratie: Februari 2010
- Laatst online: 26-02 16:13
[CMDR Yondu]
:strip_icc():strip_exif()/u/345810/crop55e183f615a34_cropped.jpeg?f=community)
Voor de mensen die dit interessant vinden.. ik ben bezig met een buildlog over de ImpulseRC 'Mr Steele Edition'. Deze kan je hier vinden: [Buildlog] ImpulseRC Alien "Mr Steele Edition - Quadcopter
Ik ga het hebben over de onderdelen, bouwen en instellingen in OpenTX, KISSgui, OSD etc. Misschien leuk om te volgen.
Ik ga het hebben over de onderdelen, bouwen en instellingen in OpenTX, KISSgui, OSD etc. Misschien leuk om te volgen.
- Kars
- Registratie: November 2010
- Laatst online: 13-05 21:22
DutchWalnut schreef op woensdag 22 november 2017 @ 08:33:
Voor de mensen die dit interessant vinden.. ik ben bezig met een buildlog over de ImpulseRC 'Mr Steele Edition'. Deze kan je hier vinden: [Buildlog] ImpulseRC Alien "Mr Steele Edition - Quadcopter
Ik ga het hebben over de onderdelen, bouwen en instellingen in OpenTX, KISSgui, OSD etc. Misschien leuk om te volgen.
1-7-4-10-2-8-6-12-3-9-5-11
Let op:
Het is tijd voor een nieuw deel, met een nieuwe bijgewerkte topicstart. Ben je ervaren met drones en wil je meehelpen? Stuur @_ferry_ een DM.
Voor je filmpjes post, wees je bewust van de regelgeving omtrent het vliegen met drones en besef dat je op eigen risico post. Er wordt actief gekeken naar beeldmateriaal en waar het is opgenomen en wie het gemaakt heeft.
Het is tijd voor een nieuw deel, met een nieuwe bijgewerkte topicstart. Ben je ervaren met drones en wil je meehelpen? Stuur @_ferry_ een DM.
Voor je filmpjes post, wees je bewust van de regelgeving omtrent het vliegen met drones en besef dat je op eigen risico post. Er wordt actief gekeken naar beeldmateriaal en waar het is opgenomen en wie het gemaakt heeft.