:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
/u/69484/crop65eb3317e5e80.png?f=community)
:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
Het Grote Drone / Multirotor topic - deel 2
:fill(white):strip_exif()/f/image/1ZEwK6dIWa6GJzcXI2nXm3cw.png?f=user_large)
Welkom in Het Grote Drone / Multirotor Topic!
Lees de openingspost goed door, veel beginnerszaken worden hier besproken en in de toegevoegde links kun je ontzettend veel informatie vinden over deze hobby. Vraag in dit topic gerust om advies of hulp.
Mocht je een goede aanvulling hebben voor de OP, geef dit dan aan in het topic, dan wordt de OP z.s.m. geüpdatet.
Ik probeer een kleine opzet te maken wat het e.e.a. uitlegt. In deze hobby staat alles meermaals beschreven op het internet, dus je zult zelf ook moeten gaan zoeken. Het principe word hieronder uitgelegd.
Tip is om veel in een modelbouwforum te gaan lezen, en de 2e hands corner in de gaten te houden. Je kunt echt goed shoppen bij mede hobbyisten en die helpen je ook altijd graag verder.
BELANGRIJK (1): No-fly-zones Nederland:
Er zijn al wat discussies geweest over de diverse kaarten waar de no-fly zones in staan aangegeven. GoDrone is de officiële kaart voor Nederland, maar is vaak niet compleet en/of correct met de informatie. Daarvoor is de AERET kaart eigenlijk veel beter.
Hieronder de betreffende no-fly zone kaarten:
Aeret Drone Preflight Basic Map
Drone No-Fly zones
BELANGRIJK (2): Drone vliegbewijs & -registratie (A1/A2/A3):
Vanaf 31 december 2020 zijn er nieuwe regels bij het vliegen met een drone of een ander onbemand luchtvaartuig, bijvoorbeeld op afstand bestuurbare vliegtuigjes en helikopters.
Heb je een drone zwaarder dan 250 gram, óf een drone met een camera, dan ben je verplicht een registratie te doen bij het RDW. Kijk hier voor meer informatie.
Heb je een drone die méér dan 250 gram weegt, dan heb je ook een vliegbewijs nodig. Deze kun je hier gratis behalen en is geldig voor drones in de A1/A3 categorie.
• Welkom• Wat is dat eigenlijk een drone of multirotor?• Oke, maar hoe zit zo een ding in elkaar??• Onderdelen• Features• Modellen• Nawoord
- Niet slecht, maar wat kost het?
- Gaat dit snel stuk?
- Ik ben Piloot!!
- Klaar?
- Nu klaar dan?
- Maar waar moeten we dan gaan lezen?
- Toch nog een slot
Wat is dat eigenlijk een drone of multirotor?
Een drone is een voertuig wat op afstand bestuurd word en dus geen bestuurder aan boord heeft. Of het nu een vliegtuig, auto of boot is.. Drone is een verzamelnaam. Als we het over vliegende voertuigen hebben dan hebben we het over een UAV (Unmanned Aerial Vehicle).
Bestuurbare vliegtuigjes, helicopters en dus multirotors zijn UAV’s. Wij hebben het in dit topic over “Multirotors” omdat het een vliegmachine is met meerdere propellers.
Onder Multirotors heb je weer verschillen in aantal propellors en vormen. Je krijgt dan bv Tricopter, Quadcopter, Hexacopter maar ook V-Tail. Later meer hierover.
Eigenlijk hebben we het over een vliegmachine met meer dan 1 propeller (staartmotor bij heli's zijn uitgesloten
Wat je het meeste ziet is een frame met 4,6 of 8 propellers.
Een heli is vaak niet uitgerust met een computer. Dit houd in dat je erg goed moet kunnen vliegen, en veel moet oefenen op een simulator, wil je de heli überhaupt stil kunnen laten hangen. Een multirotor heeft MEESTAL wel een computer (flight controller) aan boord die de machine stil kan houden in de lucht. Als je alle sticks op je zender loslaat crashed een heli direct, en de meeste multirotors zouden stil blijven hangen. Uiteraard zijn hier talloze varianten op, en is stil hangen één van de vele mogelijkheden.
Een multirotor is gewoon leuk om te vliegen.. maar ook erg geschikt voor filmen. Mensen monteren van alles aan camera's onder hun model, en maken zo prachtige beelden. Van GoPro tot serieuze grote camera's worden gemonteerd...
Je zou die beelden ook naar een scherm of bril kunnen sturen zodat je kunt zien waar je naartoe vliegt. Vooral met een bril is de ervaring erg leuk. Let hier wel mee op en zorg dat je een spotter hebt die jouw model in de gaten houd. Ga NOOIT in je eentje met een bril op vliegen.
Als hobbyist en computer man moet dit je sowieso aanspreken. Veel is opensource en alles is aan te passen. Tweaken is een must bij multirotoren.
De piloot in dit filmpje heeft een bril op en ziet dus wat wij nu ook zien.
Het kan ook rustig
En 3D vliegen is ook mogelijk.
Het kan ook rustig
En 3D vliegen is ook mogelijk.
De discussie is er.
Ondertussen zijn er wel algemene modelvlieg regels. DIT IS WETGEVING!
Modelvlieg regels
Regelgeving vanuit de overheid
Drone No-Fly zones
Europese regelgeving
We zien helaas te vaak dat mensen met hun multirotor boven de wijk of iets dergelijks gaan vliegen en dat is NOT DONE!!!!! Nooit maar dan ook NOOIT ga je zomaar ergens boven wegen of mensen vliegen!!! Levensgevaarlijk. Het kan zomaar gebeuren dat een propeller breekt of wat dan ook... en dan hangen je propellers van 10" bij iemand in zijn arm. Zoek een geschikt terrein, zorg voor een spotter en denk gewoon logisch na.
Oke, maar hoe zit zo een ding in elkaar?
Een multirotor is in de essentie echt super simpel.
Je hebt nodig
- 4 motoren (quadcopter)
- 4 Regelaars (ESC)
- 4 propellers (en 8 reserve
- 1 frame
- 1 Moederbord
- 1 accu
- 1 ontvanger
- 1 zender
- 1 Stroom verdeler
Dit is het minimale. Daarna kun je dingen toe gaan voegen voor filmen ed... maar dit is de kale opzet van een multirotor.
Simpel gezegd:
De propellers gaan op de motoren
De motoren verbind je met de regelaars
De regelaars sluit je aan op het moederbord
De ontvanger sluit je ook op het moederbord aan
De stroom verdeler, verdeeld de stroom naar de regelaars.
Het moederbord flash je vervolgens met het model multirotor wat je hebt, maar daar meer over onder het kopje "modellen"
Je moet uiteraard een keer met een soldeerbout hebben gespeeld. Hier en daar zul je wat moet solderen zoals connectors. Het is geen micro elektronica dus simpel gereedschap voldoet.
Onderstaande foto is een hele quadcopter waar voor het gemak even 2 motoren en regelaren niet aangesloten zijn.
Rechts boven zie je dus nog 4 kabels die over zijn voor 2 extra motoren.
Vanuit elke motor lopen dus 3 kabels naar een regelaar. Vanuit de regelaar lopen 2 kabels naar de accu, en 1 kabel naar het moederbord. De ontvanger zit ook weer aangesloten op het moederbord. Het kleine ding wat je helemaal rechtsonder in beeld ziet, met het schermpje, is een accu alarm. Deze gaat piepen als de accu leeg raakt. Dat is handig, want anders crash je

Nee
Ook componenten combineren niet altijd. Hieronder vind je nog een klein stukje over alle componenten. Je bent met stroom aan het werk, en alle componenten hebben ook bepaalde eisen qua stroom. Je zult dus bv je vraag en aanbod verhouding van stroom moeten uitzoeken. Hier zijn formules voor maar ook handige websites.
Het samenstellen van componenten kun je eigenlijk alleen leren door heel veel voorbeeld set-ups te bekijken, en zelf in een calculator aan de slag te gaan.
Deze calculator word veel gebruikt
Je gaat bijvoorbeeld uit van een bepaald gewicht wat je wilt tillen, of van een bepaald vliegtijd. Middels de calculator ga je dan spelen met verschillende propellers, motors en accu's. Het rendement zul je zien veranderen, en zo kun je kijken wat het beste bij elkaar past. Je wilt bv niet 100% gas geven om überhaupt de lucht in te gaan. Als je hovert met 50% gas zou dat veel fijner zijn. Tevens is een vliegtijd van 3 minuten ook niet echt leuk... Door wat te spelen met componenten kom je al snel richting 10min vliegtijd.
De onderdelen
Dit kun je zo gek maken als je wilt. Je hebt allereerst verschillende materialen. De meest gebruikte zijn Carbon, Glasvezel en Aluminium. Ook zie je nog wel eens een houten frame.
Een frame kan ook meteen wat features aan boord hebben die gewicht en geld kunnen besparen. Een voorbeeld daarvan is de kabelboom. Later lees je daar nog wat over, maar simpel gezegd zijn er frames waar de kabelboom in verwerkt is. Hierdoor hoef je dus geen kabels en connectors meer mee te dragen om stroom te verdelen. Het nadeel is dat een defect aan je frame ook ervoor kan zorgen dat je stroom niet meer verdeelt word.
Ook zie je erg veel verschil in stevigheid. De manier waarop armen vast zitten aan de basis platen, en nauwkeurigheid van de fabrikant heeft erg veel invloed op hoe "rigide" het frame is. Je wilt zo min mogelijk flex, wiebel en beweging in het frame. Je moederbord kan hiervan in de stres raken.
Zelf ben ik overgegaan op een eigen idee omdat ik geen goed frame kon vinden wat stevig was en waar ik per direct onderdelen voor zou kunnen bestellen. Frames zelf maken word erg veel gedaan. Soms met snijplanken voor in de keuken, maar soms ook helemaal 3d gefreeset of zelfs geprint. Een stukje MDF met een paar balkjes is al een redelijk begin.
Beschikbaarheid van onderdelen is wel iets wat je mee moet nemen in je overweging.
Mijn zelfbouw frame van 15mm aluminium buis

TBS Discovery

Het moederbord is er echt in talloze soorten. Als beginner zou ik gaan voor een bord met autostabilisatie (level) functie. Als je dit niet hebt is het moeilijk vliegen.
Lees jezelf hier in! Als uitgangspunt is de Matek F405-STD een erg mooie voor weinig geld.
Een kaal moederbord zorgt eigenlijk enkel voor het regelen van de motoren. Hij zorgt er dus voor dat als je links wilt, de juiste motoren gaan draaien. Vervolgens kun je allerlei dingen aan het moederbord vastmaken om hem uit te breiden. Let wel op dat niet elk moederbord alles ondersteund.
Je kunt dan denken aan een GPS module zodat je via GoogleMaps een route kun plannen, en hij dat autonoom vliegt.
Het F4 bord wat ik aanhaal is uitgerust met een stabilisatie functie.
Een ander veel gebruikt moederbord is de DJI NAZA. Dit is het makkelijkste wat je kunt krijgen en echt gemaakt als kant en klaar oplossing. Het zit verpakt in een mooi doosje, dus je kijkt niet tegen het printplaatje aan. Instellen is ook het simpels bij dit bord. Alles gaat via een grafische interface en je hoeft dus niet door code heen te worstelen. Via een stukje software vink je simpelweg aan welke opties je wilt gebruiken, en stel je de drone ook meteen goed af. Simpeler kan het haast niet.
Dit is alleen wel weer 4x duurder dan een simpel F4 board.
De Muiltiwii is wat ik gebruik. Dit is een Opensource stuk code geschreven op het Arduino platform. De software kan door iedereen aangepast worden maar je hebt ook een officiële reposetory. Je zult hier echter wel door wat code moeten snuffelen. Je hoeft geen code te kunnen schrijven of een wizkid te zijn, het is eigenlijk best simpel. Je uncomment de variabelen die bij jou van toepassing zijn en laad de software in je moederbord. Vervolgens kun je dan weer middels een grafische interface de boel finetunen. Ben dus niet bang voor de code, dit stelt weinig voor. Tevens is het een veel gebruikt platform wat google weer erg nuttig maakt. De uitbreidingsmogelijkheden zijn ongekend, en een bordje kost hooguit 50 euro als het al gek word.
Quad opties kun je 3 dingen voor ogen houden.
- Stabiel: Het stabiel laten hangen van je drone(horizontaal en verticaal) (Gyroscoop en Accelerometer)
- Locatie: Een vast locatie aanhouden (coordinaten) (GPS)
- hoogte: hoe hoog je hangt (Barometer)
Als het waait en je heb geen opties aanstaan.
1- Drijft hij wel af van zijn locatie
2- Blijft hij niet stabiel hangen
3- Veranderd hij wel van hoogte
= Continu corrigeren van je locatie, hoogte en de hoek waarin je drone hangt.
Als het waait en je hebt auto level wel aan staan maar de rest niet:
1- Drijft hij wel af van zijn locatie
2- Blijft hij wel stabiel in de lucht hangen (horizontaal verticaal)
3- Veranderd hij wel van hoogte
= Enkel corrigeren van je locatie en hoogte
Als het waait en je hebt auto level en GPS wel aan staan maar de Barometer niet:
1- Drijft hij niet af van zijn locatie
2- Blijft hij wel stabiel in de lucht hangen (horizontaal verticaal)
3- Veranderd hij wel van hoogte
= Enkel de hoogte corrigeren
Als het waait en je hebt auto level en GPS en de Barometer wel aan staan:
1- Drijft hij niet af van zijn locatie
2- Blijft hij wel stabiel in de lucht hangen (horizontaal verticaal)
3- Veranderd hij niet van hoogte
= Niks corrigeren
Seriously Pro SP F3 Flight Controller

DJI NAZA

Informatie over Flight Controllers en hun evolutie:
Oscar Liang's Blog: FPV Flight Controllers Explained
Ik ga het vanaf nu ESC noemen (Electronic Speed Controller), maar je mag dit ook motor-regelaar noemen. De ESC zit vast aan je motor, moederbord en accu. De datakabel verbind je met het moederbord, en de accu geeft de ESC en de motor die daar aan vast zit stroom.
De ESC luistert naar je moederbord, en laat de motor harder of zachter draaien.
Er zijn verschillende soorten maar je moet in ieder geval in de gaten houden dat het maximale vermogen van je motor niet hoger is dan het maximale vermogen van je ESC.
Als je motor dus maximaal 20 ampère stroom verbruikt, moet je een ESC hebben van minimaal 20 ampère. 25 of 30 zou beter zijn. Je moet ook weer niet te zwaar willen gaan ,want dan worden de ESC's ook zwaarder in gewicht, en kun je minder lang vliegen.
ESC's kun je ook flashen met andere firmware. Ik zou hier in het begin niet mee beginnen, maar uiteindelijk is het wel iets om naar te kijken. Je kunt bv een firmware flashen die meer geschikt is voor acrobatisch vliegen. Er komt wel het eea bij kijken, maar echt ingewikkeld is het ook weer niet. De meest gebruikt aftermarket firmware is de "BLheli_S" firmware. Deze word ook wel eens vanuit een winkel al op de ESC gezet.. dus als je niet zelf wilt flashes, kun je ze ook kopen.
ESC's worden vaak gebruikt als stroombron voor het moederbord. Let hier dus op bij aanschaf. In het hoofdstuk BEC/UBEC/SBEC vind je hier wat meer info over, maar mocht je gebruik gaan maken van de output functie van je ESC dan moet deze wel overeen komen met de vraag van het moederbord. MEESTAL is dit wel het geval, maar ik heb ook uitzonderingen gezien. Er zijn ook ESC's die het gewoon helemaal niet aan boord hebben.
De meeste ESC's dien je te kalibreren. Dit scheelt per ESC maar tegenwoordig kun je de meeste ESC's direct via software (bijv. BLheliSuite) instellen en kalibreren. De andere methode is via je zender. Je verbind dan een losse ESC met je ontvanger en middels je zender en een piepjes patroon stel je hem dan in. Bespaar je die moeite en doe dit via de software.
Let ook even op de aansluitingen. Meestal worden ESC's geleverd zonder connector. Er zitten dan wel draadjes aan maar geen plugje. Die moet je er zelf aan solderen en meestal zijn dit Bullet connectors. Gebruik ook niks anders dan Gold Plated Bullet connectors. Ook ik was eigenwijs en heb het met iets andere geprobeerd, maar corrosie en storingen staan direct klaar. Je zou de kabels ook gewoon direct vast kunnen solderen zonder connector, maar dat is niet echt handig in onderhoud. Het scheelt wel weer gewicht wat ook wel weer fijn is.
DYS 30A ESC

Bullet connectors

Dit samen is wat ingewikkelder. Je hebt heel veel soorten motoren maar je kunt in ieder geval zoeken naar "brushless outrunner motor" Dit zijn de type motoren die we gebruiken. Je moet hier echt even op gaan googlen. Je motor bepaald welke accu je gaat kopen, welke props je kunt gebruiken, en of je bv een heel fel model krijgt of een heel rustig.
Propellers zijn er in verschillende lengtes, en met verschillende pitch (spoed). Afhankelijk van de pitch en de lengte geeft hij een bepaald vermogen. Je motor moet dat weer aankunnen. De formule word hier ingewikkeld, maar daar komt de voorgenoemde calculator weer naar boven. Nogmaals, ga hier eerst over lezen!
Om een voorbeeld te geven:
Een propeller van 7" lang, spint sneller op dan een van 10" lang. Want de weerstand van een 10" is hoger dan die van een 7". Je motor heeft ook weer specificaties omtrent maximale weerstand. Als je dus een langzaam draaiende motor hebt, met te kleine props, dan word er te weinig lucht verplaatst en gaat hij niet omhoog. Je zou dan het voltage van je accu kunnen verhogen om zo de motor harder te laten draaien. Maar de motor heeft ook weer grenzen, dus die kan wellicht kapot gaan. Een grotere prop zou ook te veel weerstand kunnen geven, en ook daar gaat je motor weer van stuk.
Al bij al is dit je huiswerk. Begrijpen wat motoren, propellers en accu's voor invloed hebben op elkaar .
Hier als plaatje uitgelegd:

Je hebt bij een Quadcopter (4 propellers) in ieder geval 2 linksdraaiende en 2 rechtsdraaiende propellers nodig.
Ook voor mij is dit allemaal nog zoekwerk... maar vragen mag altijd.
Propellors die wij kopen zijn niet perfect in balans. Meestal is 1 van de 2 bladen iets zwaarden of zit het gaatje voor de motor niet helemaal precies in het midden. Dit moeten we balanceren. Je kunt hier het beste een propellor balanceer apparaatje voor kopen. Hier hang je de propellor in en met minimale weerstand kun je dan zien of hij in balans is. Vervolgens voeg je bv plakband toe aan de lichte zijde, of schuur je wat weg aan de zware kant. Op Youtube staan talloze filmpjes die het haarfijn uitleggen.
Ook je motoren kun je balanceren. Wederom, zie Youtube. Wellicht zul je denken , ach het valt wel mee.. ze klinken wel goed, maar als je dan met een laserpen techniek gaat kijken of ze in balans zijn schrik je echt even. Er is serieus veel winst te behalen met het balanceren van de verschillende onderdelen.
Stel je hebt een heel klein beetje onbalans in je motor. Dan zul je dit bij lage toeren niet zo snel merken, maar bij hoge toeren kan dit direct invloed hebben op de beeld kwaliteit van je camera. Zie het als je auto. Een auto met onbalans in de wielen is geen probleem bij 50Kmh. Maar als je eenmaal 120Kmh op de snelweg rijd moet je het stuur toch goed vast gaan houden.
Op je motor zitten Propeller-adapters. Dit is zorgt ervoor dat je propeller op je motor geïnstalleerd kan worden. Afhankelijk van je propeller heb je een bepaalde diameter gaatjes. Ook propeller-adapters hebben verschillende maten. Je moet hier dus een combi in zoeken MAAR, meestal zitten er bij je propellers een setje ringetjes die een propeller universeel maakt.
2 Tiger T-Motoren. 650KV MT3506

Een links en rechtsdraaiende Propeller

Een propeller balanceer apparaatje is ook wel handig

We gebruiken Lipo accu's met meestal 3 of 4 cellen. 3 cellen geeft 11.1 volt., 4 cellen geeft 14.8 volt. Afhankelijk van je motor en propellers kies je een accu. De capaciteit bepaald hoe lang je vliegt. Meer capaciteit betekend ook een zwaardere accu.. Ook hier geld weer, Als je 80 ampère nodig hebt voor 4 motoren, dan moet je een accu zoeken die minimaal 80 ampère vrij kan geven.
Accu's worden met allerlei connectors geleverd. Je zult dus een verloopje moeten maken, maar kunt ze er ook afknippen en met je eigen plugje gaan werken.
LET OP: Als je de plug eraf knipt doe dit dan per pool/kabel. Dus eerst zwart helemaal afmaken en in de nieuwe plug, en daarna pas rood. Zorg ervoor dat je kabels nooit NOOIT elkaar aanraken. Er komt energie vrij zoals bij een las apparaat, en ja daar schrik je van
Aan elke accu zit ook een balanceer kabel. Deze is nodig bij het opladen want hierdoor kan de oplader elke cell apart opladen en de accu dus balanceren. Op dit plugje sluit je ook je Lipo Alarm aan.
Dit plugje kun je overigens misbruiken als stroombron in je drone, maar lees hier eerst zelf maar meer over.
LET OP:
Lithium-Polymeer-accu’s (afgekort: LiPo-accu’s) hebben een bijzondere behandeling nodig. Dit geldt zowel voor het laden en ontladen als ook voor de opslag en het verdere gebruik. Hierbij moet u letten op de volgende specificaties:
Een foutieve behandeling kan tot explosies, brand, rookontwikkeling en vergiftiging gevaar leiden. Tevens leidt het niet opvolgen van de handleiding en de waarschuwingen tot vermindering van de prestaties van de accu en andere defecten.
Een handige accessoire voor je accu is een piepertje (lipo alarm) die aangeeft waneer de accu leeg begint te raken. Je stelt hier een minimaal voltage in en als dat bereikt word gaat hij piepen. Dit is wel zo handig.. want anders valt je model uit de lucht..
Voor 3 dollar heb je er al een.. NIET overslaan dus!
Lees deze PDF omtrent LiPo accu's even goed door
Hier een filmpje met voorbeelden
Turnigy 4s 2.2A Accu

Een kabelboom zorgt ervoor dat de kabel van de accu opgesplitst word in meerdere kabels. Elke ESC+motor heeft namelijk een eigen stroom kabel.
Deze dingen zijn goed zelf te maken, maar hier 2 voorbeelden van een kabel model en een printplaat model.
Let wel altijd op het maximale vermogen van deze dingen.
Doe het zelf kabel boom. Van accu naar 4 ESC's

Printplaat model (PDB)

Zenders zijn er in alle maten. Je moet onthouden dat je een X aantal kanalen hebt op een zender. De ene zender heeft dus 4 kanalen, de andere wellicht 12.
Je hebt er minimaal 4 nodig. Maar advies is om minstens 6 kanalen te nemen. Soms wil je dingen uit kunnen schakelen als hij in de lucht hangt, en dat doe je dan met de 2 extra kanalen. 4 zijn er nodig voor het vliegen an sich.
Je hebt de ouderwetse 35Mhz zenders, en de nieuwere 2.4Ghz.. Er is verschil.. maar kijk ook even naar je budget. Handig om te weten is dat een 35Mhz zender een lange antenne heeft, en een 2.4Ghz niet. (2e hands is hier echt de weg om te gaan)
Bij die zender word meestal ook de ontvanger geleverd. Deze vangt je signalen op en stuurt dit naar het moederbord van je multirotor.
Let wel op dat jouw zender en ontvanger hetzelfde protocol ondersteunen. FlySky heeft het ADFHS 2A protocol, terwijl FrSky werkt met ACCST, en Spectrum gebruik DSMx.
FrSky Taranis X9D zender

FrSky X4r ontvanger

Een BEC converteert stroom naar een lager voltage. Alle 3 doen exact hetzelfde maar in het wild worden de termen door elkaar gebruikt.
Meestal is je accu 12 of 14 volt. Sommige onderdelen op je drone vergen echter een lager voltage. Bv een FPV camera kan nog wel eens om 5 volt vragen en je moederbord vraagt 3.3 volt. Je zult dan een BEC aan je accu moeten hangen die het voltage naar gewenst niveau brengt. Je hebt dus verschillende versies die ieder een bepaald voltage afgeven. Voor een paar dollar heb je ze.
Houd in de gaten wat de input en output is van een BEC en je kunt niet fout gaan. Sommige BEC's werken ook meteen als accu alarm. Hij begint dus te piepen als je accu leeg raakt.
BEC

Hier komt de casemodder aan zijn trekken. Als je toevallig met een 3s 12volt accu vliegt is er een casemod wereld die klaar voor je staat. TL balkjes, LED strips , Spot leds... Verzin het en monteer het.
Toch is het verstandig even naar het verbruik te kijken. Je wilt je accu niet leeg trekken als je de kerstboom even aan zet. Je kunt dus ook kijken naar lager voltage spul om wat zuiniger te zijn. In de drone winkels kun je het zo vinden maar ik vind het zelf altijd leuk om iets in elkaar te solderen.
Verlichting werkt ook erg handig bij de oriëntatie. Soms is het lastig om op afstand te bepalen hoe je drone in de lucht hangt. We kennen allemaal wel het gifje van de ballerina die OF linksom OF rechtsom draait afhankelijk van wat je jezelf verteld. Dit gebeurd ook bij drones. Soms weet je het gewoon niet meer op een afstand van bv 20 meter.
Het is dus handig als je de voorkant en achterkant markeert met lampjes. Je ziet dan makkelijker hoe je drone is georiënteerd en dat vliegt makkelijker.
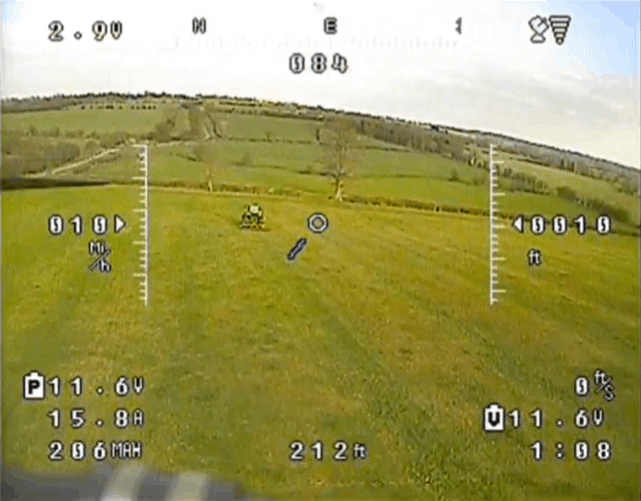
Iets wat onze gamers zou moeten aanspreken. Normaal gesproken moet je altijd naar je toestel blijven kijken als je aan het vliegen bent. Met een FPV setjes maak je daar echter een echte first person ervaring van.
FPV staat voor "first person view". Op je drone zit een camera die beelden naar de piloot stuurt. De piloot ontvangt deze beelden en bekijkt dit via een schermpje of zelfs via een video bril. Je ziet dus wat je drone ziet.
Dit maakt van een vlucht echte first person ervaring en is erg intens. Je kunt door de bossen scheuren en precies zien waar je tussendoor kunt of niet. Uiteraard missen we de safe game
Vooral een videobril maakt dit erg leuk. Je hebt het idee dat je zelf bovenop je drone zit.
De techniek hierachter is redelijk eenvoudig. Je zult een camera en een zender op je drone moeten monteren en een ontvanger bij je moeten dragen. Een complete set incl videobril heb je voor 300euro. Je kunt ook alles zelf samenstellen wat iets goedkoper is en uiteraard betere kwaliteit KAN opleveren.
Om het helemaal af te maken kun je ook nog een headtracker monteren. Hierdoor beweegt de camera op je drone mee met de bewegingen van je hoofd. Als je naar links kijkt blijft je drone gewoon vooruit vliegen, maar draait de camera op de drone wel naar links. Je kijkt dus als het waren om je heen. Hiervoor moet een headtracker chip op je hoofd zitten. En je moet een klein camera stabilisatie gimbal hebben voor op je drone. Bij de voorgenoemd set zit dit er bij.
Uiteraard heb je verschillen. De belangrijkste is de zend frequentie. Je maakt een verbinding tussen je drone en je schermpje of bril via een RF signaal. De meeste gebruikte frequenties zijn 2.4 Ghz en 5 ghz. Je moet opletten dat je niet dezelfde frequentie pakt als waar je zender voor het sturen op zit. Dit kan conflicten opleveren. Dus je stuurt bv over 2.4ghz en video gaat over 5ghz.
Ook kun je vluchtdata meesturen zodat je op het scherm of bril ziet hoe hoog en hard je vliegt. Meer hierover in het hoofdstuk OSD.
Als je gaat zoeken word je gek van de mogelijkheden. Heb je hier allemaal geen zin in kijk dan naar de Fatshark Atitude inc. een losse camera. Je bent dan helemaal compleet.
Een ander belangrijk punt is de afstand die het video signaal haalt. Je hebt bv speciale antennes en ontvangers die ervoor zorgen dat je verder en verder kunt ontvangen. Verdiep je hier in maar kijk bv sowieso even naar een Cloverfield antennes.
Fatshark FPV set

OSD staat voor On Screen Display. Meestal koop je een klein printplaatje met sensoren zoals een hoogte meter en een snelheidsmeter. De informatie daaruit stuur je door naar je FPV scherm of bril. Hierdoor zie je dus de hoogte en snelheid. Er zijn talloze mogelijkheden maar een hele handige is bv een accu indicatie die aangeeft hoe vol de accu is.
OSD is niet echt nodig maar wel een leuke goedkope upgrade.
Voorbeeldje van OSD
Een gimbal is een stabilisatie steun voor je camera. Als je op je drone een camera monteert dan draait deze mee met de drone. Als je dus naar voren vliegt kijkt de camera naar de grond en vlieg je naar achteren dan kijkt hij in de lucht. Als je een rollende bocht naar links maakt dan zie je dus een schuine horizon op beeld. Dit is voor serieus filmen niet ideaal. Je wilt eigenlijk dat je camera altijd horizontaal hang ongeacht de manoeuvres van je drone. Hierdoor krijg je dus een strak beeld zonder schommelingen. Een gimbal zorgt daarvoor. Een gimbal is meestal een metalen frame met een sensor en 2 of 3 motoren. De sensor registreert of de drone scheef hangt. Als dat zo is dan draaien de motoren de camera weer horizontaal. Dit gaat heel snel en kan in 3 richtingen werken. Er zijn ook gimbals die niet met motoren maar met servos werken. Deze zijn erg goedkoop maar iets minder stabiel. Voor iemand die het wil testen is het wel een goede oplossing.
Dit maakt de beelden een stuk mooier. Als je drone bv door de wind gevangen word en scheef geblazen word, zie je daar helemaal niets van terug op beeld. Als het goed is zal het beeld horizontaal blijven zonder schommelingen.
Je hebt ze heel klein voor bv een GoPro of keychain cam, maar durf je er een DSLR onder te hangen dan hebben ze die ook.
Vergelijk even wat verschillende soorten maar let op dat je niet op 1 filmpje afgaat. Als de drone zelf erg slecht gebouwd is of bv slechte propellers heeft dan zal een gimbal daar weinig aan kunnen doen.
Je kunt dit in een compleet setje met gimbal, motoren, moederbord en sensor kopen. Maar ook zelf samenstellen. Het laatste kan ingewikkeld worden dus verdiep je hier even in.
Prijstechnisch kun je alle kanten uit. Sowieso bepaald het formaat en dus de draagkracht al een deel van de prijs. Toch zijn er dan weer GoPro gimbals voor 100 en van 1000 euro. Laat je niet gek maken je zult ze allemaal moeten finetunen. Ook de goedkopere werken goed als je er wat tijd aan besteed.
Gimbal voor DSLR camera's

Een landing op de buik is geen probleem. Ik vlieg meestal zonder landingsgestel en ervaar geen problemen. De meeste piloten doen dit overigens. Maar stel je hebt een gimbal onder je drone hangen dan gaat dat niet. Je zult dan een soort van pootjes moeten monteren die ervoor zorgt dat je gimbal de grond niet raakt.
Uiteraard is de meest eenvoudige methode zelf een setje pootjes van aluminium of bv pvc te maken. Het meest simpele voldoet. Ook zijn er kant en klare oplossingen die je er binnen 5 min onder hebt hangen.
Voor de fanatiekeling en filmer zijn er ook inklapbare poten. In het algemeen ziet er dit mooier uit maar een ander voordeel is dat je poten nooit in beeld kunnen komen. Als je camera vast gemonteerd is kun je hier wel omheen werken maar bij een gimbal kan het zijn dat je camera zo draait dat de pootjes in beeld komen. Dit is natuurlijk niet de bedoeling en dan monteer je inklapbare poten.
Mochten se niet uitklappen om wat voor reden dan ook, en je hebt een gimbal... Dan zit je wel met een probleem. Test dit dus allemaal goed!
Features
RTH staat voor Return To Home. Voordat je opstijgt lock je de drone op de positie waar je staat. Vervolgens kun je met het overhalen een schakelaar de drone terug naar die plek laten komen. Dit kan wel eens handig zijn als je hem niet meer ziet, met bril vliegt of de oriëntatie kwijt bent en in paniek schiet. Sommige RTH modules kunnen ook je accu spanning aflezen en het bereik van je zender in de gaten houden. Mocht het zijn dat je bereik weg valt of je accu leeg is dan vliegt hij automatisch terug naar huis.
LET OP: meestal zit er een locatie in opgeslagen als je hem aanschaft. Die moet je dus verwijderen. De verhalen zijn er van mensen die hun drone naar China zien vliegen omdat ze vergeten zijn een nieuw thuispunt in te stellen. Elke keer als je het veld ingaat moet je dat dus even doen.
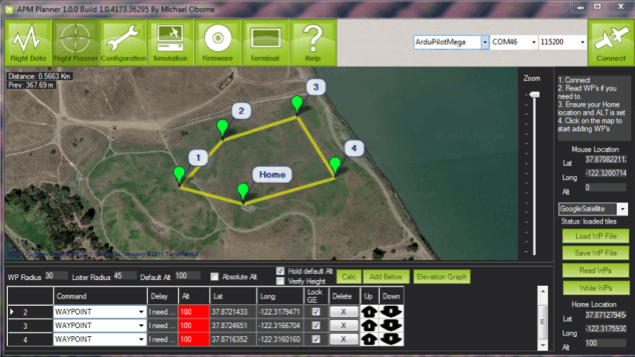
Een drone kun je helemaal autonoom laten vliegen middels waypoints. Aan boord moet dan een gps module zijn en via de computer kun je dan een route plannen. Soms gaat dit via een google maps achtige applicatie maar ook via coordinaten kun je dit instellen. Je kunt de hele route uitstippelen en bepalen hoe de drone in de lucht hangt zoals bv zijwaarts, voorwaarts enz. Ook kun je de gimbal laten draaien. Als je 1 zelfde object in beeld wilt houden kun je die locken. De camera kijkt dan altijd naar het object terwijl je drone een route aflegt.
Uiteraard zitten hier wat risico's aan. Sowieso moet je altijd in staat zijn om de route te over rulen. Je wilt altijd handmatige controle houden. Ook kan het zijn dat om de een of andere reden het gps signaal wegvalt en dan kan het goed zijn dat je hem kwijt bent. Test dit dus allemaal uitvoerig.
Mission planner
Om de instap wat makkelijker te maken kun je een software simulator kopen. Dit is eigenlijk best wel ideaal. Je sluit jouw eigen zender aan op de computer, en in een 3d simulator kun je dan op je gemak eerst eens wennen aan de controller. Het is of eerst een simulator of eerst een speelgoed drone. Maar begin niet meteen met je 200 dollar model
Ik hoor goede dingen over simulators, maar ook slecht. Je zou langer doen over het leren omdat je niet de druk van een crash voelt, en overstappen naar de echte wereld is natuurlijk weer net iets anders. Maar al bij al heb je er weldegelijk iets aan. Tevens kun je later ook acrobatische manoeuvres testen in de sim alvoor je het veld in gaat.
Modellen
Je hebt inderdaad verschillende vormen toestellen. Meestal zie je een X of + of H model.
Hieronder wat voorbeelden. Kijk ook eens naar de draairichting van de motoren.
Het y6copter model heeft dus 2 motoren en 2 propellers per arm. 1 aan de onderkant, en 1 aan de bovenkant van de arm.
Ik zou beginnen met setup met 4 propellers in een X vorm. Hier word het meeste over beschreven op het internet.
Dit noemen we een quadcopter.
De voorkant van je model word bepaald door het moederbord. Het moederbord heeft een voorkant en achterkant.

Een miniquad Hubsan X4 (goed om te oefenen voor 50euro)

Een mooi instapmodel frame DJI 450

Een ander model frame (TBS Discovery)

Een Hexacopter

Een Octocopter

Een DJI Phantom. Kant en klaar voor een instap bedrag.

Een tricopter. Dit is iets ingewikkelder, maar de manier van vliegen is erg mooi.

Als je meer lift wilt, kun je voor een dubbele propeller opzet gaan.

Om hem efficiënter te maken, en ook een stuk veiliger kun je kiezen voor fanducts.

Nawoord
Dat is moeilijk
Om een indicatie te geven wat een budget model zou kosten:
1 motor = 15 dollar (x4 dus)
1 ESC = 12 dollar (x4 dus)
1 moederbord is = 35 $
1 accu = 30 $
1 frame = 30 $
1 setjes props = 10 $
1 zender (NIEUW) = 60 $
1 ontvanger = 10 $
Dan nog wat connectors en klein spul.. en je zou aan de slag kunnen.
Uiteraard is het verstandig om wat reserve onderdelen klaar te hebben liggen.
Het valt op zich wel mee.. De dingen die het meest stuk zullen gaan zijn de propellers en de armen. Als je op de buik land dan gaat alles meestal wel goed, maar als je schuin land dan slaat er dus een propeller in de grond. Deze breekt meestal af. Nu zijn propellers niet zo heel duur, maar als je de betere hebt kan het al snel 15 euro voor 4stuks kosten. Vooral in het begin zul je er wat sneuvelen. Ook het aanraken van een tak of de grond kan een gat in het propeller blad slaan.. Die zul je moeten vervangen. Meestal vliegt het nog wel, maar niet meer stabiel. Tevens kan de propeller dan ook spontaan uiteen spatten door de schade. Niet handig dus.
De armpjes zijn er eigenlijk meestal op gemaakt om te breken. Je ziet dit zelfs als verkoop argument. Het meest gebruikte armpje kost aftermarkt dan ook 6 dollar. Je wilt het liefst dat er iets afbreekt wat goedkoop is dan dure propellers of motoren. Bestel die dus 2 extra.. Meestal kun je ze in het veld vervangen, en het is balen als je nog voldoende accu's hebt, maar niet meer kunt vliegen.
Lipo accu's zullen langsaam slechter worden. Je kunt dit uitstellen door nauwkeurig gebalanceerd te laden, en ze juist op te bergen, maar ze gaan er uiteindelijk allemaal een keer aan. Hou ze goed in de gaten en het is zelfs niet onverstandig een dagboek van elke accu bij te houden. Dan weet je wat je mist als de vliegtijd langzaam minder word.
De rest gaat niet snel stuk. je kunt bij een flinke klap de basisplaten van het frame nog wel eens breken, maar je ziet het niet vaak. Zelfbouw met lokale bouwmarkt producten is DE oplossing hiervoor trouwens.
Ik zorg er voor dat ik ongeveer 5 reserve sets met props heb, omdat het verzenden zo lang duurt.. En de rest kan ik vaak op zondag nog halen.. Vooral de Hornbach is voor mij half walhalla...
Je bent inderdaad piloot, maar ook zoals bij een Boeing zul je even moeten oefenen. Het is pittig in het begin, en dat komt eigenlijk doordat je soms van je af vliegt en soms naar je toe vliegt. Dit zul je moeten leren om autonoom te kunnen doen. Begin dus met een speelgoed dingetje wat niet snel stuk gaat
Als je dat onder de knie hebt gaat het beginnen .Je zult dan langsaam de gecombineerde manoeuvres gaan maken. Je kunt een bocht op meerdere manieren inzetten, en de mooiste voor het oog vergen nogal wat verschillende stick inputs. Dit is leuk om te leren omdat het zweet je op de rug staat. Wederom hebben we geen safegames, dus de adrenaline giert je door je lijf.
Nee nu begint het pas... Je moet gaan lezen en gaan lezen. Uiteindelijk moet je in een week lezen een heel eind komen. Super ingewikkeld is de basis niet...
Word lid van een modelbouw forum.. en ga daar kijken naar wat andere mensen doen.
1 ding is echt belangrijk:
---->GA NIET ZOMAAR BOVEN MENSEN VLIEGEN!!!!!!!!!!<----
Je moet anders even gaan googlen naar wat voor schades deze props kunnen aanbrengen... en dan word het wel duidelijk dat je geen risico wilt nemen.
NIET doen dus.
Nee ik wil je eerst nog veel plezier wensen en wat inspiratie meegeven. Vind je dit allemaal maar eng, begin dan met een Hubsan X4 . Dit is een quad op handformaat en voor binnen. Je kunt dan lekker testen en vliegen zonder dat er dingen stuk gaan. Het ding is super stevig.. en onderdelen kosten enkele euro's. Een echte aanrader om te leren vliegen.
Een miniquad Hubsan X4 (goed om te oefenen voor 50euro)
Waar te vliegen
Tweakers.net Quadcopter Spots
Zelf een Tweakers.net Quadcopter Spot toevoegen
Lekker weer om te vliegen?
DroneWeatherOnline (door @Reinout W)
Grote webshops
hobbyking.com Lees vooral ook de user reacties onder de producten!
rctimer.com
Fora
modelbouwforum.nl
rctechnics.com
fpvlab.com
RCgroups.com
Algemene Informatie
Oscar Liang's Blog (zeer veel informatie!)
Joshua Bardwell's YT-kanaal
Solderen - tips & tricks (video)
Bouwverslag
Bouwverslag Alien 5'' race/freestyle drone (video)
[Buildlog] ImpulseRC Alien "Mr Steele Edition - Quadcopter
Tweakers.net heeft zelf een race-drone gebouwd! Check it out!
.Build: Bouw je eigen Racing Drone!
Verloren & gevonden drones
Dronegevonden.nl
Accessoires
Conrad.nl
Berekeningen
Deze calculator word veel gebruikt
Reglement & wetgeving
Modelvlieg regels
Wetgeving omtrent modelvliegen
No-fly zones
Algemene regelgeving
Infopagina Rijksoverheid (ook voor zakelijk gebruik)
Kits, of bijna complete kits
DJI klein
DJI groot
TBS
GAUI
Droidworx
Xaircraft
Century
Altura
Vulcan
SteadiDrone
Webwinkels
www.fpv-parts.nl
www.boltrc.eu
www.fpvriot.nl
www.ftec-shop.nl
QuadcopterRacing
MultiRotorParts (MRP)
Quadcoptersenzo
Filmpjes
Youtube kanaal met erg leuke filmpjes
Team Black Sheep kanaal (fabrikant van TBS discovery)
Samenwerkende drones
Tot slot: Ben niet bang, ga lezen en het valt allemaal mee. Het is mij gelukt om in 2 weken tijd een vliegend model te hebben. Ik ben nog wel even bezig met tweaken, maar het vliegt.
Alles staat echt dubbel en dwars op het internet.. dus googlen!
Nogmaals BLIJF LOGISCH NADENKEN!
En ga dus niet als een idioot boven je binnenstad of voetbalclub vliegen. Ja dat zijn mooie beelden, maar ow ow.. als het mis gaat ben je zo gigantisch de sigaar. Google een avondje naar crashes en ongelukken en je leert het zo af.
En ga dus niet als een idioot boven je binnenstad of voetbalclub vliegen. Ja dat zijn mooie beelden, maar ow ow.. als het mis gaat ben je zo gigantisch de sigaar. Google een avondje naar crashes en ongelukken en je leert het zo af.
VEEL PLEZIER!!!!!
Laatste update: 03-02-2020 door Kars
[ Voor 206% gewijzigd door World Citizen op 25-04-2023 19:20 ]
:strip_icc():strip_exif()/u/326874/crop588097c82e375_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/234177/what-carrot.jpg?f=community)
:strip_icc():strip_exif()/u/545996/photo.jpg?f=community)
/u/300076/crop59b52708c822b_cropped.png?f=community)
/u/510521/60px-Happy_smiley_face.png?f=community)
:strip_icc():strip_exif()/u/291935/crop58e292b81413e.jpeg?f=community)
/u/33916/crop5d4d5b00c4c16_cropped.png?f=community)
:strip_icc():strip_exif()/u/58505/crop566ed1a71f9a5_cropped.jpeg?f=community)

:strip_icc():strip_exif()/u/269825/crop59b99a05143d4.jpeg?f=community)
:strip_exif()/u/490207/Einstein.gif?f=community)
/u/446870/crop5db0017462e30.png?f=community)


:strip_icc():strip_exif()/u/294301/crop57601646bd092.jpeg?f=community)


:strip_icc():strip_exif()/u/143607/naze60.jpg?f=community)
:strip_exif()/u/119562/gunther.gif?f=community)
