ErBo66 schreef op zondag 22 september 2019 @ 15:58:
[...]
Vraagje: Ik ben gister ook overgestapt naar direct drive met een Trianglelab BMG en MicroSwiss hot end met de
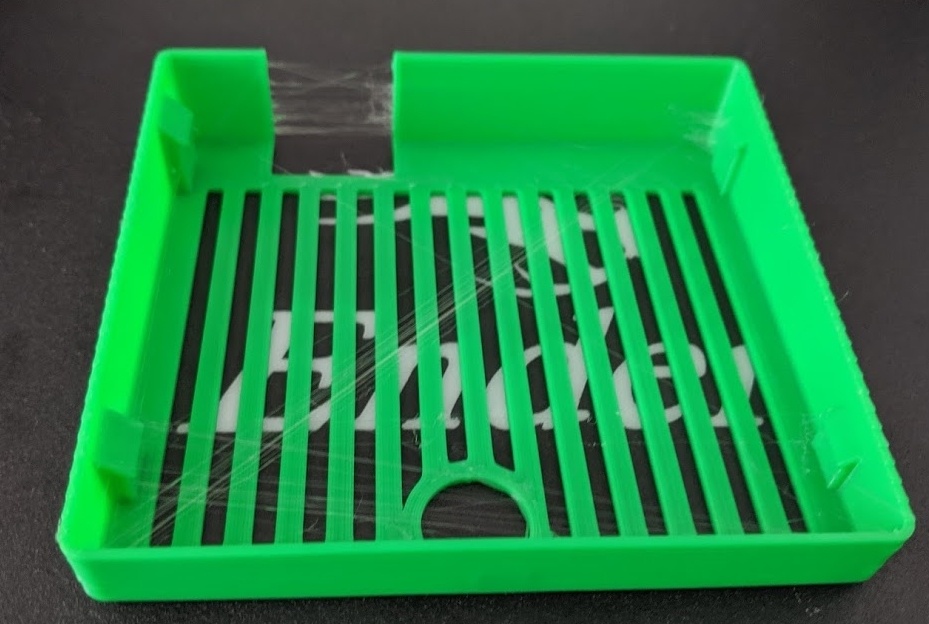
petsfang mod. Uiteraard heb ik nu het ene probleem (stringing e.d.) ingeruild voor het volgende nl ringing/ghosting/echo's hoe je het ook wilt noemen.
Hoe gaat dat bij jouw/jullie? Hebben julle hiervoor speed/accelerations aangepast? Zoja, naar welke waardes?
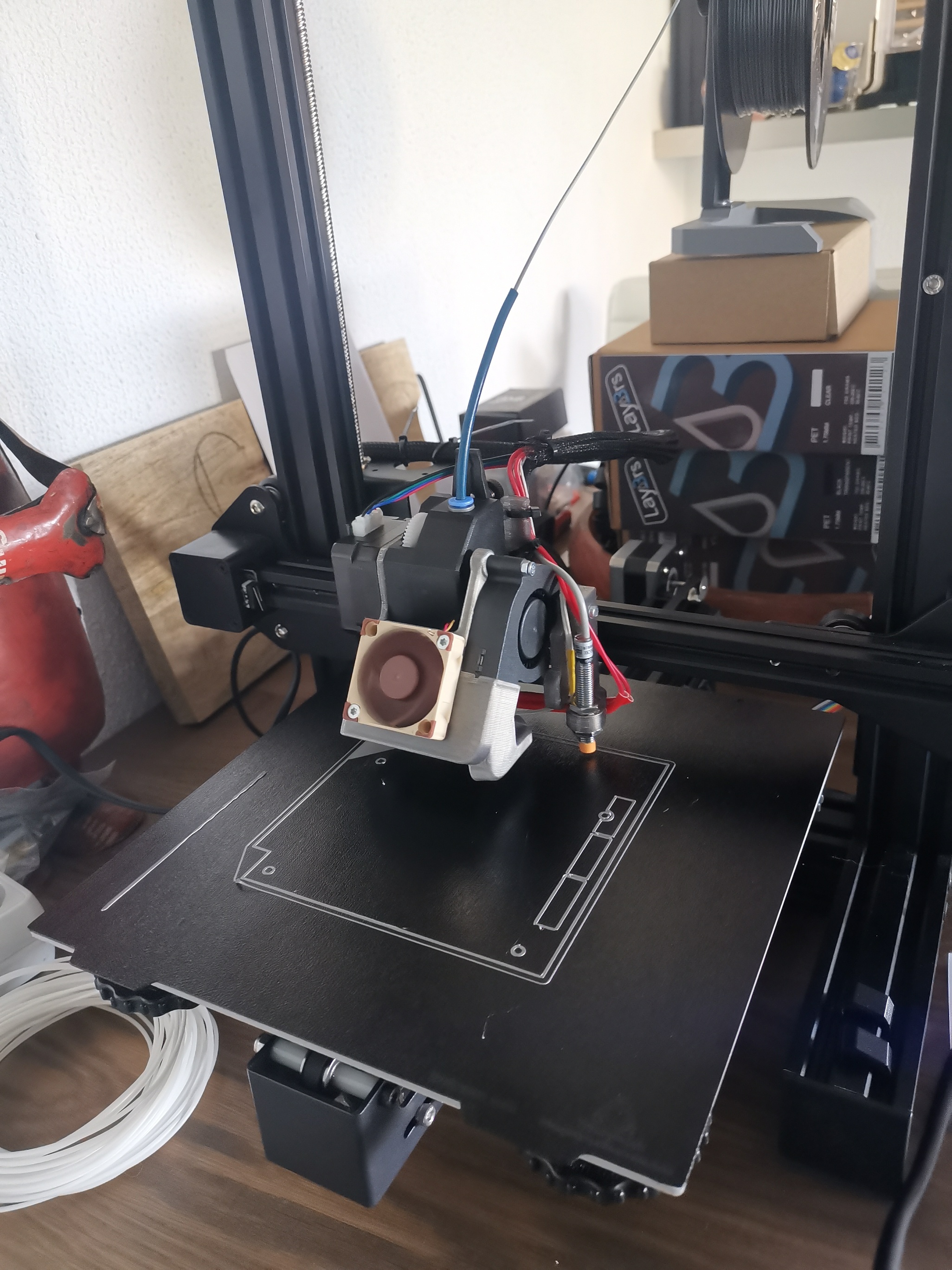
Zo, de printer staat weer op z'n oorspronkelijke plek. Nadat ik afgelopen week alle upgrades een keer aangesloten had om het te testen, was het vandaag de tijd om het netjes te maken.
Wat ooit begonnen is als een Ender 3 Pro, is hij zo bijna niet meer te noemen. Lijstje met upgrades:
-Mobo: SKR V1.3 met TMC2208
-Hotend: Trianglelab V6
-Extruder: Trianglelab BMG + pancake steppermotor (Nema 17 22mm)
-Hotend fan: Noctua 4010 (12v)
-Part cooling fan: Trianglelab 5010
-Mobo case van: Noctua 4010 (12v)
-PSU fan: Noctua NF-A6
-Mobo Case: Ender 3 all in one, universal rear electronics case
(Teaching Tech)
-Bed: Trianglelab Dubble Sided PEI steel Sheet
-ABL: Trianglelab M8 inductive proximity sensor.
-Software: Marlin 2.0.x bugfix
Zo, flinke waslijst aan vernieuwingen. Niet allemaal tegelijk gekomen, maar grootste gedeelte wel. Zal een beetje in het kort beschrijven wat ik heb gedaan om alles (verrassend in 1x) werkend te krijgen.
Eerste tip is om een flink aantal video's van Teaching Tech op Youtube te kijken, die verteld duidelijk wat er allemaal bij komt kijken als je verschillende dingen gaat vervangen.
Ik ben begonnen met een schone versie van Marlin in te laden in Atom. Dan bij platformio aan te geven welke versie hij elke keer moet compilen (LPC1768), overeenkomend met de chip op de SKR v1.3.
Uit de Marlin-bugfix\config folder de standaard configuraties voor de Ender 3 gehaald en in de Marlin folder gezet. Vanuit deze files heb ik alles naar wens ingesteld:
-SERIAL_PORT en SERIAL_PORT_2 ingesteld op -1 en 0
-MOTHERBOARD BOARD_BIGTREE_SKR_V1_3
-TEMP_SENSOR_0 heb ik op 5 gezet, overeenkomend met de instellingen voor de V6 hotend.
-Z_MIN_ENDSTOP_INVERTING en Z_MIN_PROBE_ENDSTOP_INVERTING op TRUE gezet, de inductieve sensor is een NO-variant, dus geeft alleen signaal als deze iets tegenkomt. Normale endstop doet het tegenovergestelde.
-Stepper Drivers op TMC2208 gezet.
-DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, 400, 427 }, die 427 komt overeen met de BMG extruder.
-Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN geactiveerd, mijn sensor komt precies op de plek van de Z-eindstop.
-Het is een Fixed Probe, dus FIX_MOUNTED_PROBE geactiveerd.
-Daarna moet je bij offset aangeven op welke locatie de probe zich bevind. Bij de mount die ik heb gebruikt is dit X-49.
-X_MIN_POS en X_Y_POS aangepast, aangezien de mount ervoor zorgt dat de Y-eindstop er niet meer voor zorgt dat de nozzle op het bed terecht komt. Bij mij was dit Y-18.
-Bed Bed leveling kiezen welke manier van levelen je wilt. Ik heb gekozen voor Bilinear, 3x3 grid.
-Z_SAFE_HOMING aangezet, dan pakt hij het midden van het bed om Z te homen, zodat de probe altijd op het bed zit.
-Als je het stock scherm wilt gebruiken, kijk dan even of CR10_STOCKDISPLAY aan staat.
Nadat ik dit allemaal ingesteld heb, firmware gecompiled en op de SD-kaart gezet. SKR opnieuw opgestart, en firmware stond erop!
Daarna was het natuurlijk kijken of alles goed werkte. Eerst gekeken of de motoren allemaal werkte. Deze draaiden eerst de verkeerde kant op, maar dat kwam omdat ik niet goed gelezen had en deze in Marlin had omgedraaid. Na een nieuwe flash werkte deze weer.
Volgende was het controleren van de hotend. Eerst gekeken of deze wel opwarmde, en dat ging goed, alleen zat er een kleine overshoot in. Dus daarna eerst een
PID-calibratie gedaan via Pronterface. De waardes die daarna eruit kwamen opgeslagen met M500 en ook meteen even in Marlin gezet, mocht ik een volgende keer de firmware opnieuw flashen, staan deze waardes meteen goed.
Next stop:
E-steps goed zetten. Dit zorgt ervoor dat er ook echt de hoeveelheid materiaal uit de nozzle komt die we willen hebben. Kwam eruit dat de standaard waarde voor de BMG extruder erg goed in de buurt zat (4% afwijking). Deze even gecorrigeerd, en ook weer in Marlin gezet voor een volgende keer.
Laatste stap voor het aanzetten van de eerste print: Z-level bepalen. De inductieve sensor heeft een vangbereik van 2mm, dus deze mag niet te ver van de nozzle af zitten qua hoogte. Heb geprobeerd hem op ongeveer 1 mm van de nozzle te plaatsen. Daarna kun je via de papiermethode kijken wat je offset is. Goede hoogte bereikt? Dan de waarde van het scherm overnemen naar de Z-offset in je instellingen en deze opslaan.
Daarna was het tijd om te printen!!
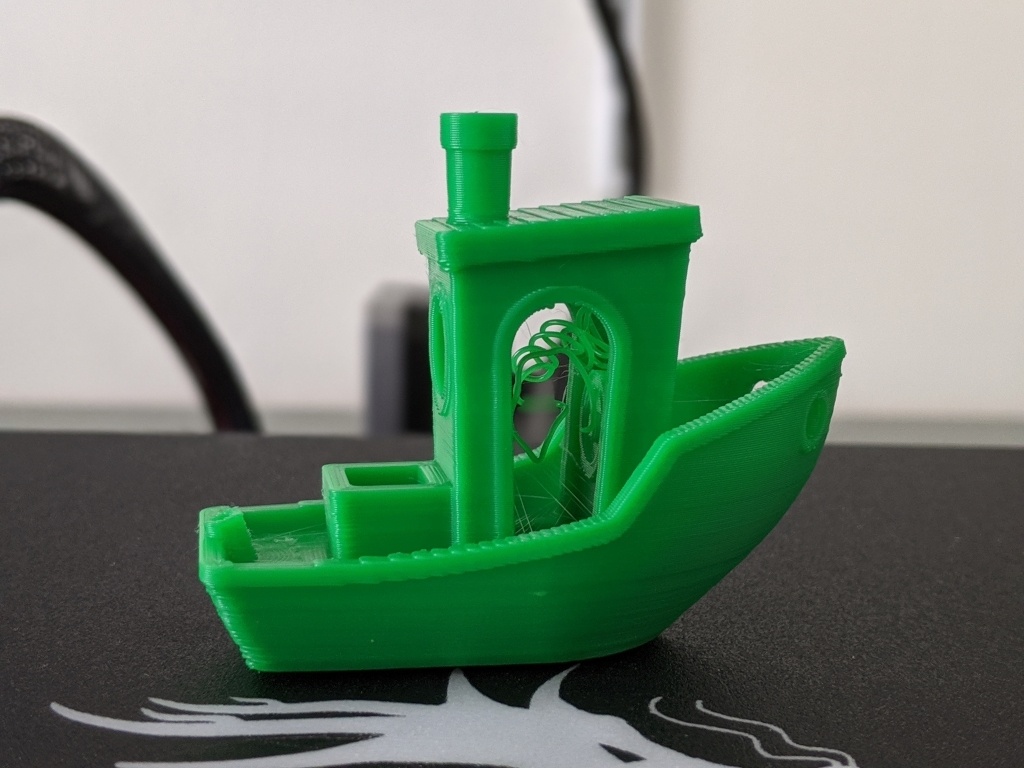
Eerste XYZ-kubus die ik printte zag je inderaad, zoals hierboven, dat hij wat last had van echo's. Dit komt natuurlijk omdat een direct drive extruder een stuk zwaarder is dan een Bowden setup. Nadat ik in PrusaSlicer (ben overgestapt van Cura aangezien ik daar steeds meer problemen mee kreeg) de acceleraties omlaag had gezet naar Perimeters=600 en de rest op 1000, kwam de tweede kubus er bijna feilloos uit! Ook de eerste Benchy die ik daarna heb geprint was misschien wel de beste ooit!
Was even een flinke klus, maar dan krijg je ook wel wat. Geheid dat ik iets ben vergeten op te noemen, dus als je zelf voor zo'n opstelling gaat, neem asjeblieft niet alles klakkeloos over, maar denk goed na wat je instelt. Er zullen vast wel wat vragen zijn, stel ze gerust!
Natuurlijk ook nog een paar fotootjes:






 *Note: De grijze case is geprint voordat ik de printer ingesteld heb, zodat ik snel de onderdelen kon monteren. Uiterlijk hiervan maakt toch niet zoveel uit, gaat om de functie!
*Note: De grijze case is geprint voordat ik de printer ingesteld heb, zodat ik snel de onderdelen kon monteren. Uiterlijk hiervan maakt toch niet zoveel uit, gaat om de functie!
:fill(white):strip_exif()/i/2003714744.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2003711968.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2002605494.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2002668340.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2002349499.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2002239171.jpeg?f=thumbmini)
:fill(white):strip_exif()/i/2003588498.jpeg?f=thumbmini)
:strip_exif()/i/2007005480.webp?f=thumbmini)
:fill(white):strip_exif()/i/2003792772.jpeg?f=thumbmini)
:strip_icc():strip_exif()/u/20528/crop56c73242b954c.jpeg?f=community)
:strip_icc():strip_exif()/u/325435/crop5d74d07da6853_cropped.jpeg?f=community)
/u/300076/crop59b52708c822b_cropped.png?f=community)
/u/138339/crop5edaa1d094734_cropped.png?f=community)
/u/350050/crop5ec3c29b35bba_cropped.png?f=community)
:strip_icc():strip_exif()/u/517742/crop5a3cc583be19f_cropped.jpeg?f=community)


:strip_exif()/u/206557/captain-obvious.gif?f=community)

:strip_icc():strip_exif()/u/208430/3f5a00acf72df93528b6bb7cd0a4fd0c.jpeg?f=community)




/u/482044/hand.png?f=community)
/u/323521/crop5ee09b3c89699_cropped.png?f=community)
/u/40371/pino.JPG?f=community)




/u/308442/DRUNKEN%2520SAILOR%2520forum.JPG?f=community)
/u/312280/crop5f996e7a7cc68_cropped.png?f=community)
:strip_icc():strip_exif()/u/292587/crop5dea3b0480369_cropped.jpeg?f=community)
/u/352681/crop5a60a4ca1e3f6_cropped.png?f=community)
/u/143917/crop635fe053e2d26.png?f=community)


:strip_icc():strip_exif()/u/22362/kedtll.jpg?f=community)
{kind=link}