ImmortalSoul schreef op zaterdag 28 maart 2020 @ 20:55:
[...]
Diff:
code:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
| diff
# version
# Betaflight / DALRCF405 (DLF4) 4.0.5 Aug 1 2019 / 11:45:14 (839661b20) MSP API: 1.41
# start the command batch
batch start
board_name DALRCF405
manufacturer_id
# name
# resources
# timer
# dma
# mixer
# servo
# servo mix
# feature
feature -AIRMODE
feature OSD
# beeper
# beacon
# map
map TAER1234
# serial
serial 0 64 115200 57600 0 115200
# led
# color
# mode_color
# aux
aux 0 0 1 1925 2100 0 0
# adjrange
# rxrange
# vtx
# rxfail
# display_name
# master
set acc_calibration = 50,-34,-96
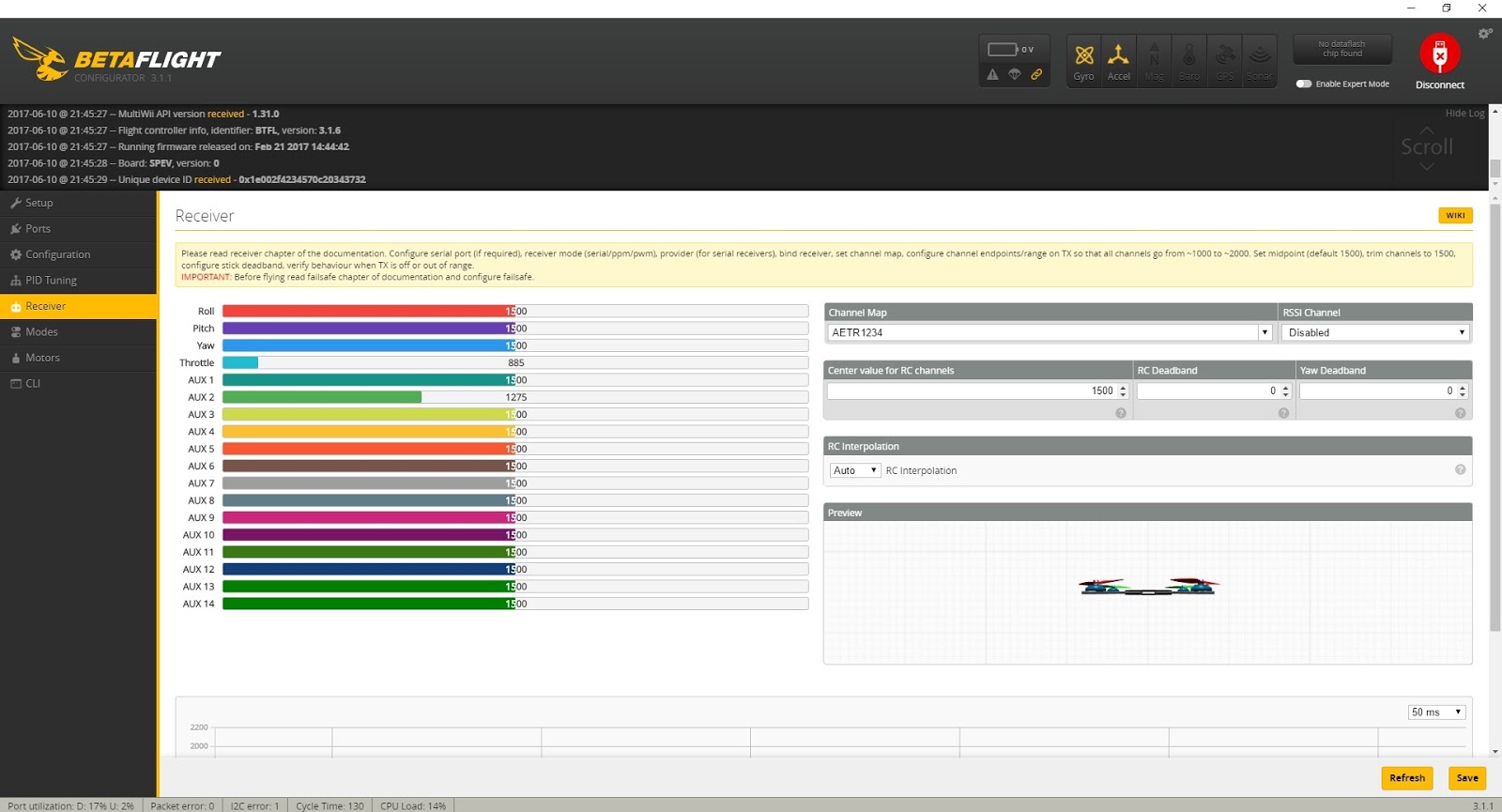
set min_check = 1000
set dshot_idle_value = 500
set motor_pwm_protocol = DSHOT600
set yaw_motors_reversed = ON
set osd_crosshairs_pos = 6413
set osd_current_pos = 14401
set osd_mah_drawn_pos = 14435
set osd_power_pos = 14392
set osd_warnings_pos = 14761
set osd_avg_cell_voltage_pos = 14370
set osd_stat_battery = ON
# profile
profile 0
# rateprofile
rateprofile 0
# end the command batch
batch end
# |
Volledige dump:
http://www.codedump.be/code/13586/
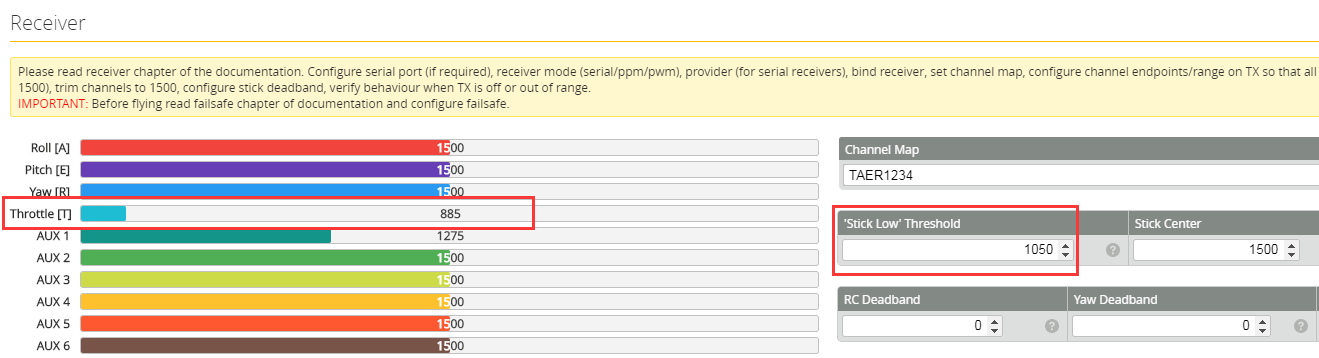
Als ik in je dump kijk staat je min_check op 1000.
Zet deze eens op 1050 (default) en kijk of het dan werkt. De badrx duidt erop dat je throttle helemaal naar beneden net iets boven de 1000 komt, dat kan 1001 zijn. Door de min_check op 1000 te zetten kan je alleen armen als je thottle in de receiver tab 1000 of lager is. En als jij je kwad aanzet en je receiver gaat aan en deze geeft een waarde boven de 1000 krijg je de badrx waarschuwing.
Als het je wel lukt om te armen en je geeft een beetje gas dan kan je runaway takeoff in kicken omdat ie een ongebruikelijk snelle punch ziet bij het opstijgen omdat je dus direct over die 1000 gaat ipv de kleine delay die ie normaal nodig heeft om over de 1050 te gaan of überhaupt een input op de throttle direct na het armen. Iemand die bijvoorbeeld perrongeluk armed met z'n throttle net laag genoeg om te kunnen armen maar net hoog genoeg om te kunnen opstijgen of om schade aan te richten als je met je handen in de buurt van de props bent.
Die protectie staat standaard aan en hoelang deze actief is kan ik mij niet herinneren maar heb het zelf wel eens gehad dat ik direct met een een punch en een flip wil opstijgen en dan kickt ie ook wel eens in.
De combi van jouw errors met de settings min_check op 1000 klinkt logisch dat je dan dit soort problemen krijgt.
Ik leg het misschien niet helemaal correct uit maar dat is een beetje hoe ik het systeem begrepen heb. De daadwerkelijke code die er achter zit die bepaald wanneer het wel en niet geactiveerd wordt zal vast gecompliceerder te werk gaan zoals ik het nu uit leg maar ik denk dat het in grove lijnen wel klopt.
Bijna alle manieren waarmee je jezelf perrongeluk kan verwonden bij het armen en opstijgen hebben ze onder die runaway protection gegooid en die werkt verdomde goed. In hele zeldzame gevallen zoals ik hier boven omschrijf doet ie z'n werk iets te goed en zou je de timer ervan kunnen veranderen maar zou het iedereen afraden. Die timer kan je ook niet voor niets enkel veranderen via de CLI terwijl het toch al weer een tijdje in BF zit.
Het weegt niet op tegen de veiligheid die het biedt en je moet best goed je best doen om met 'normaal' opstijgen de runaway protection te activeren.
Je moet er trouwens ook rekening mee houden dat je niet kan armen als je aan de computer hangt via USB of met je mobiel via bluetooth mocht je een FC hebben die dat ondersteund. Dat is de MSP ARM_SWITCH melding. Die kan je wel omzeilen door in de motor tab die toggle om te zetten dat je props eraf zijn dacht ik.
Dan heb ik nog 1 laatste tip.
Het lijkt erop dat je de kwad test op je balkon. Mochten je filters niet helemaal lekker staan ingesteld en alles lijkt te werken en je probeert te hooveren kan het wel eens gebeuren dat je kwad dusdanig gaat oscilleren dat ie ineens vol gas geeft als je de sticks een beetje beweegt om de kwad de corrigeren. Als je runaway proction dan al voorbij bent moet je snel disarmen anders vliegt je kwad ongecontroleerd vol gas weg. Niet ideaal vanaf een balkon. Op balkon armen en testen kan wel maar dan moet je niet gaan hooveren als je niet zeker van je zaak bent dat je filters en PID instellingen goed staan. Het zal zelden tot nooit voorkomen maar je zal maar net zien dat het jou wel overkomt. Ik heb het zelf wel eens in de slaapkamer gehad met een 2 inch micro dus de schade was beperkt maar met een 5 inch vanaf balkon kan de schade best wel eens naar uitpakken. 700 gram carbon op iemand z'n hoofd of auto is best wel vervelend. Long story short, test een 5 inch altijd op een veldje als je hem voor de eerste keer gaat testen. Dat kan best de speeltuin of de hondenuitlaatstrook op de hoek van de straat zijn, als je maar iets van marge hebt om op tijd te disarmen zonder schade aan te richten.
In het geval van mijn 2 inch kon je prima hooveren maar zodra de kwad op bed kwam en de airmode bounce kwam schoot ie recht omhoog tegen het plafond aan

Buiten kwam ik er achter dat als ik iets te veel de pitch of roll gebruikte ie er ook vol gas vandoor ging

Met een 2 inch is het al schrikken maar met een 5 inch simpelweg gevaarlijk. 5 inch kwads zijn geen grappen en kunnen serieuze schade aanrichten. Als een 2 inch je al kan openhalen kan je je wel voorstellen wat een 5 inch blade doet met veel sterkere motoren.
Dan weer een stukje shameless self promotion

Heb vorige week voor het eerst bij een 'office spot' gevlogen. Het waaide best hard dus ideaal is anders maar het waren hele vette spots! Ben er vandaag weer geweest maar de wind kwam nu uit een andere richting en was nog veel verraderlijker rond de gebouwen dus na een paar packs toch maar besloten om naar m'n oude vertrouwde plekkie te gaan.
Ik zal de footage van vandaag nog wel eens aan elkaar plakken maar het filmpje van vorige week is ook best leuk geworden al zeg ik het zelf.
De persoon waarmee ik vloog heeft de Tango 2 en DJI spul en mocht van hem een pack vliegen met zijn gear. De Tango 2 vond ik persoonlijk helemaal niks. Ik vind mijn Nirvana vele malen lekkerder in de hand liggen en ook over het DJI systeem was ik niet helemaal te spreken want merkte direct wat hick ups toen ik wat verder weg vloog maar dat beeld...dat is echt ongelooflijk! Hij klaagde dat ie ghost branches lastig kon zien dus stelde voor om eens met mijn HDO2 te vliegen om het verschil te zien. Dat wilde ie niet omdat ie zichzelf niet ervaren genoeg vond om met iemand anders z'n kwad te vliegen maar dan had ie wel gesnapt dat ie geen recht van zeuren heeft over ghost branches.
Wat een beeld en wat een innovatie vergeleken met analoog maar ik heb geen spijt van mijn HDO2. Buiten het feit dat al mijn kwads analoog zijn vond ik de hick ups wel een serieus issue. Ik snap dat dit nog te verbeteren valt met firmware upgrades en dat 1 pack rustig aan vliegen geen heel realistisch beeld geeft maar ik voelde me toch een stuk meer zeker met een analoge setup. Je weet precies wanneer je signaal te slecht wordt en als het echt slecht wordt heb je gewoon slecht beeld i.p.v. rare hick ups en delay.
Ik ben reuze benieuwd waar Fatshark mee gaat komen deze lente/zomer. Ze hebben bevestigd dat het Byte Frost systeem naar een Fatshark module bay komt en het schijnt dat de eerste test units verzonden zijn. het beta product zag er al beter uit dan analoog maar bij lange na niet zo goed als DJI maar dat kon ook aan de gebruikte camera's liggen voor zover ik begreep. Als die met een betere camera komen met de positieve eigenschappen van analoog en een beeld wat in de buurt komt van DJI dan vrees ik dat de spaarpot dit seizoen weer snel op is.
[
Voor 83% gewijzigd door
Radiance op 29-03-2020 03:56
]
:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
:strip_icc():strip_exif()/u/141461/crop5e2b6cc42ec35_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/314685/crop5e72ad1644d55_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
/u/36460/Pancrase_Hybrid_Wrestling_logo%252060x60.png?f=community)
:strip_icc():strip_exif()/u/605437/crop5bd227179ea01_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/672549/crop56ccc0c77a28e_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/963135/crop5df2a764f35b9_cropped.jpeg?f=community)

/u/297222/aaffd9838a75fb4f702fc62c071cf9fd.png?f=community)
:strip_icc():strip_exif()/u/10541/Elmo.jpg?f=community)
:no_upscale():strip_icc():fill(white):strip_exif()/f/image/KkyD3TReiYsiGtef7bHUgUYd.jpg?f=user_large)
{kind=link}
{kind=link}