MsG schreef op vrijdag 6 april 2018 @ 22:39:
[...]
Haha ik vlieg nog steeds op m'n recommended Radiance build uit 2016 met SP Racing F3 Pro, analoge ESC's en RS2205's van Banggood. Zelfs nog twin props, in plaats van de tri's die nu iedereen gebruikt. Hoop morgen ook weer te kunnen vliegen. Mocht ik het echt ontstijgen dan zie ik het wel weer, maar ik doe niet mee aan de upgrade-race zonder noodzaak :-P. Overigens kan je die oude flight controllers nog prima gebruiken voor zelfbouw wings of zelfbouw reguliere vliegtuigjes, worden ze net wat slimmer en handiger in gebruik dan wanneer je puur kaal de servo's voedt met de receiver. Zo kan je bijv. ook level stabilizing inbouwen.
Ik vlieg er ook nog steeds mee hoor!

Ik heb in november een nieuwe quad gebouwd met behoorlijk wat upgrades maar heb er ook de nodige problemen mee gehad en als het dan niet werkt ben ik blij dat ik m'n ZMR250 nog heb. Nu is die setup wel een stuk minder leuk om te vliegen omdat ie gewoon veel minder power heeft en logger aanvoelt dan m'n nieuwe build maar het is beter dan niets hebben.
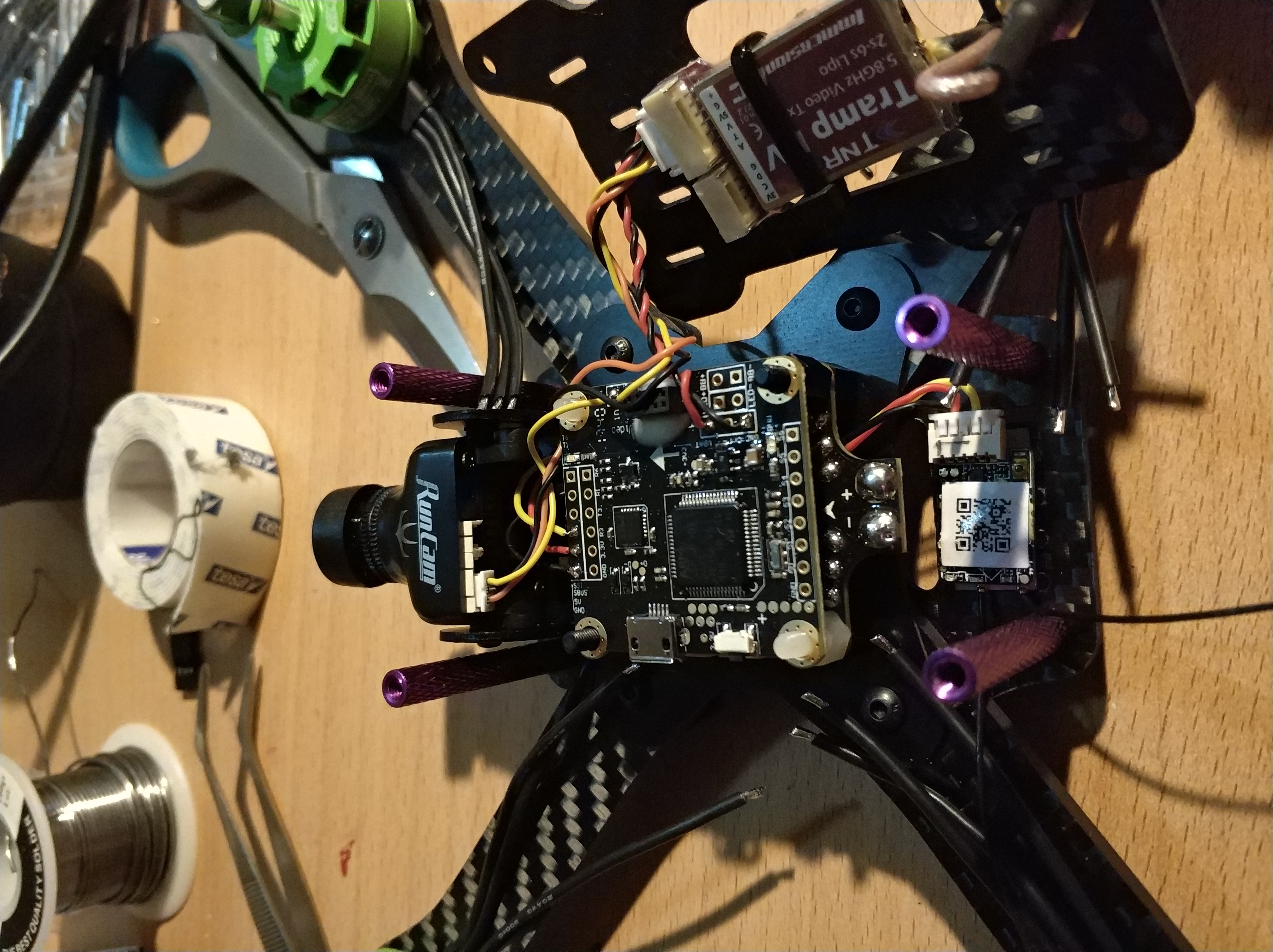
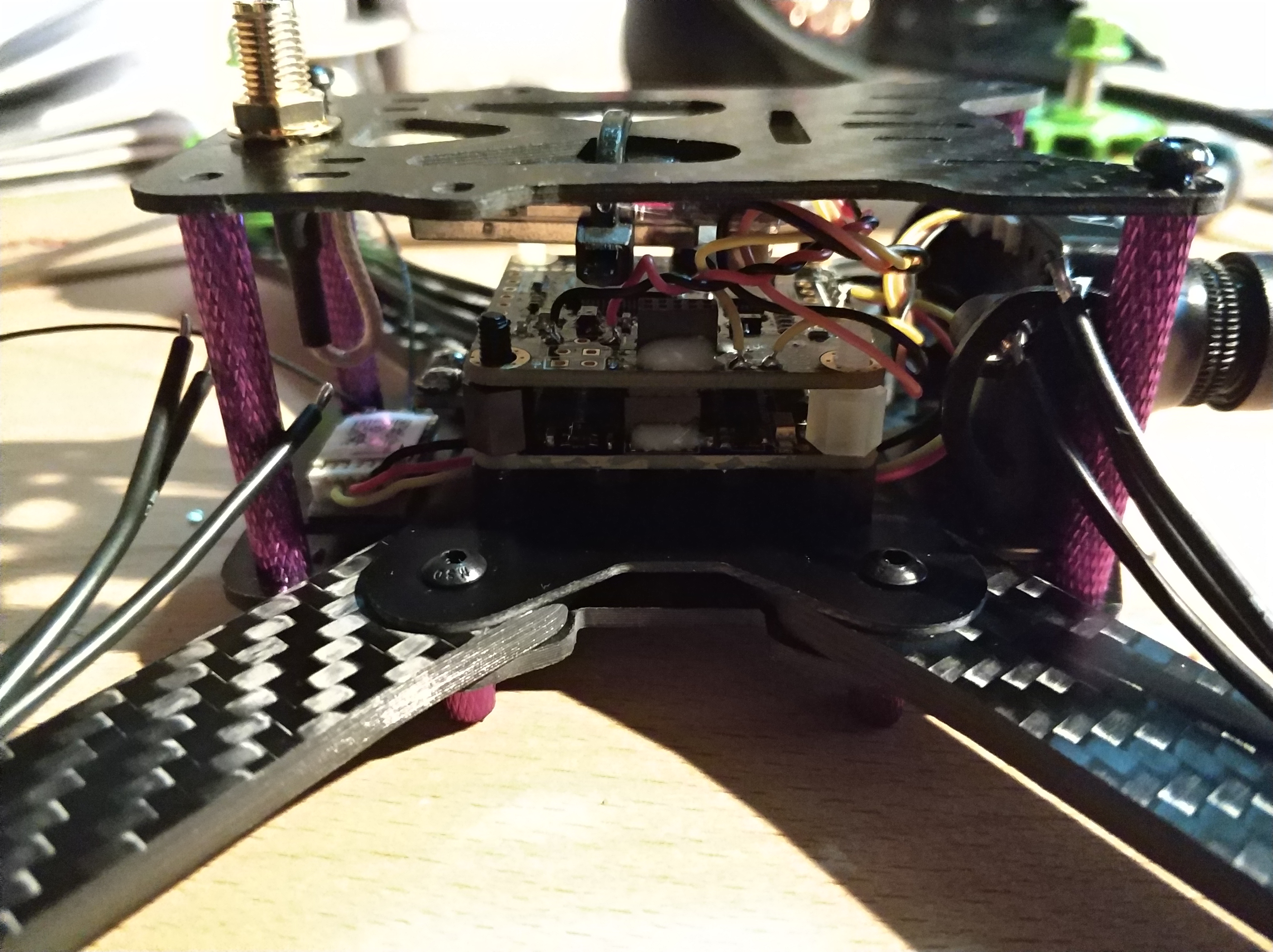
Die oude build met de SPF3 doet het tot nog toe altijd en vliegt met de default settings best goed.
De motoren zijn misschien zwak en niet zo smooth als high end motoren maar ze werken wel nog steeds. Ik heb wel af en toe last van een desync bij snelle rolls met de Racerstar ESC maar verder valt er prima mee te vliegen, zeker voor die prijs en iemand die net begint.
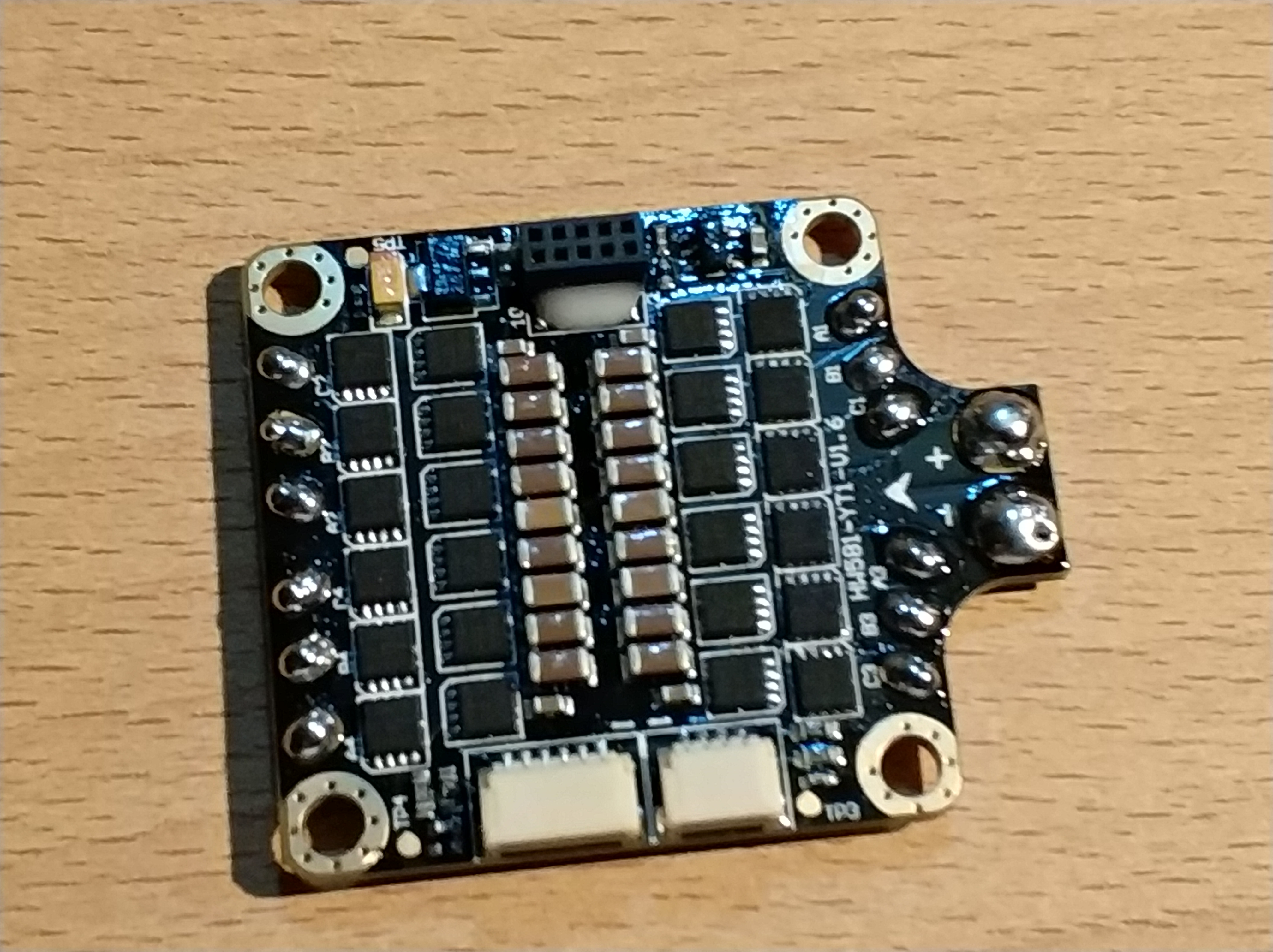
En ook de SPF3 laat je zelden in de steek...je hebt dan niet alle hedendaagse features maar het vliegt wel. Ook de Matek HubOSD doet z'n werk nog steeds prima, heeft een degelijke OSD en met een 1k uf 35v cap op de batterij draden is de FPV feed prima te doen.
Voor iemand die net begint en zelf wil gaan bouwen denk ik dat dit nog steeds een degelijke build is want met alle settings op default is er al prima mee te vliegen en de onderdelen kosten geen drol. Hoewel je tegenwoordig ook prima BNF quads hebt met betere specs voor minder geld mis je imo misschien wel een van de leukste aspecten van deze hobby, het knutselen. Ik vind het vaak zelfs jammer als het in elkaar zetten van een quad er weer op zit en denk dan direct na wat ik eventueel kan gaan verbeteren als er iets stuk gaat...Ik hoop nog net niet dat ik iets kapot ga vliegen zodat ik weer kan gaan bouwen.

Maar goed, ondanks dat ik m'n nieuwe build veel beter vind vliegen heb ik er ook een stuk meer problemen mee dan de bovengenoemde setup.
Zo heb ik al 2 defecte Matek F405 AIO FC's gehad maar dat beschouw ik als pech. Nu leek alles met de Kakute V2 opgelost te zijn maar toen ik vanavond ging vliegen liep ik weer tegen allerlei rare problemen aan waardoor er niet mee te vliegen viel.
Ik had voordat ik ging vliegen Betaflight geupdate naar 3.3.1 en had wat gerommeld met de filter settings aan de hand van de video's van
UAV Tech. Op de bench leek alles in orde maar ik vlieg wel altijd eerst even LoS om te kijken of alles ook daadwerkelijk werkt, zeker gezien het rommelen met de filter settings.
Bij het opstijgen merkte ik al direct dat bij minimale stick input de quad overdreven veel wilde corrigeren. Kleine stick beweging naar links of rechts en de quad begon raar te twitchen om hem weer level te krijgen. Ik vloog in airmode en met level krijgen bedoel ik dus mijn eigen input om de quad weer level te krijgen. Het leek er dus op alsof er extreem veel D was toegevoegd in de PID settings maar die waren gewoon default. Bij het landen voelde ik even aan de motoren en die waren allemaal behoorlijk warm, zo warm heb ik ze nog niet eerder gehad.
Ik ben toen 1 voor 1 de filter settings terug gaan zetten naar default maar ook dit mocht niet baten. Daarna de gyro en PID loop naar beneden gezet tot 4k/4k en ook verschillende ESC protocollen hielpen niet.
De motoren voelden ook erg warm aan na slechts een klein beetje hoveren, zo warm had ik ze nog niet eerder gevoeld in ieder geval.
Ik had blackbox niet goed ingesteld dus kon toen ik thuis kwam ook geen logs bekijken maar ik snapte er niets van. Alle settings waren hetzelfde als de laatste keer dat ik er mee vloog en toen vloog ie prima...Uiteindelijk heb ik een verse installatie van 3.3.1 geïnstalleerd en alles default gelaten maar het probleem bleef zich voor doen. Ik had nu echter wel blackbox ingesteld en toen ik ging kijken in de logs bevestigde dit het vermoeden dat de D settings de kluts kwijt was, hele heftige oscillaties.
Na een hoop gerommel met de settings en zwaar geïrriteerd op en neer lopen naar het veldje voor de deur wilde ik eigenlijk de handdoek in de ring gooien en wat logs hier en op rcgroups posten om te vragen of iemand een suggestie had maar ik had nog 1 ding niet geprobeerd, Betaflight downgraden naar 3.3.0.
Eerst met default settings testen, alles werkt. Daarna gyro en PID loop omhoog en alles werkte nog steeds. Daarna de filters een voor een aangepast en alles werkt nog steeds.

Ik was inmiddels al een stuk of 10 keer vanaf 3 hoog op en neer gelopen naar het veldje hier voor de deur en het was inmiddels al donker dus kon niet echt meer doen dan een beetje hoveren en heen en weer gaan maar de quad reageert weer normaal. Ook de motoren voelen niet heel warm meer aan.
Ik had toen de gyro en PID loop op 16k/16k staan met de settings die
UAV Tech adviseert maar ik zag in de logs dat mijn motor noise op 410hz zit met D-Term lowpass filter op PT1 en D-Term notch aan met default settings. Ik heb nu de stage2 filter van 500, wat
UAV Tech adviseert verlaagt naar 400 en ben benieuwd wat voor effect dit heeft op de noise input maar dat ga ik morgen testen. Ik neem morgen in ieder geval wel m'n laptop mee want met de LUA scripts, OSD settings of de app van
Racedronesoft kan je niet alles aanpassen.
Ik heb echter wel gewoon FPV kunnen vliegen met de good old ZMR250 om de HD3 te proberen en ik kon die takken nu dus wel zien voordat ik ze raak!

(Dit betekend overigens niet dat ik ze niet meer raak

) Van alle upgrades is dit toch wel de beste...de Taranis is een hele mooie en goede upgrade ten opzichte van de Flysky i6 maar de HD3 vs de Quanum Cyclops is echt een hele andere beleving. Ik werd in het begin wel weer wat duizelig zoals ik dat had met de Cyclops in het begin maar kon er vrij snel aan wennen. Misschien moet ik nog wat spelen met de IPD settings en de plek waarop ik hem op doe maar de beleving is zeker niet minder dan een box style goggle, de details en beeld kwaliteit zijn echt 1000x beter.
Ik heb geen idee wat de FOV is van de Cyclops maar over het algemeen hebben box goggles een grotere FOV dan goggles. Nu merk ik wel dat de FOV lager is maar dit stoort mij absoluut niet, sterker nog, het doet mij meer focussen waar de focus moet liggen, in het midden. Met de Cyclops had ik veel meer de neiging om rond te gaan kijken op het scherm. Dat komt misschien ook omdat als je dat doet met de Fatshark het beeld er raar uit gaat zien.
Ik schrok namelijk wel even toen ik de Fatshark voor het eerst opzette. Ik had al een hoop gelezen over blurry edges etc. en toen ik de OSD probeerde af te lezen vond ik de tekst er ook wat blurry en funcky uit zien. Na wat spelen met de IPD en manier van dragen werd dit al minder maar helemaal weg kreeg ik dit niet. Maar na wat vliegen merkte ik steeds minder van dit wazige effect. Ik denk door dat ik met de box style goggles gewend ben geraakt om rond te kijken met beide ogen, het er in de Fatshark raar uit ziet. Naarmate ik meer met de Fatshark vloog en meer ontspannen naar de OSD settings keek en minder met mijn ogen aan het rond dwalen was waren de hoeken helemaal niet meer zo wazig zoals ik dat in eerste instantie ervoer.
:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
:strip_icc():strip_exif()/u/142797/crop5bb48830ad9bc.jpeg?f=community)

:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
/u/36460/Pancrase_Hybrid_Wrestling_logo%252060x60.png?f=community)
/u/69484/crop65eb3317e5e80.png?f=community)
/u/158668/crop58906ae431c22_cropped.png?f=community)
:strip_icc():strip_exif()/u/141461/crop5e2b6cc42ec35_cropped.jpeg?f=community)
/u/33916/crop5d4d5b00c4c16_cropped.png?f=community)

/u/446870/crop5db0017462e30.png?f=community)
:strip_icc():strip_exif()/u/122141/ic.tweakimg.net2.jpg?f=community)

/u/48718/crop619e5ed546e66_cropped.png?f=community)
:strip_exif()/u/24517/My_Pug.gif?f=community)
/u/296398/crop618d33cd3b82c_cropped.png?f=community)


:strip_icc():strip_exif()/u/55627/cedric1.jpg?f=community)

:strip_icc():strip_exif()/u/294301/crop57601646bd092.jpeg?f=community)
{kind=link}