:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
:strip_exif()/u/5050/klaaz.gif?f=community)
Geen kwalitatief hoogwaardige denk ik. Ik dacht eerst maar iets bij elkaar verzamelen zodat ik kan beginnen, dan kennis opbouwen en dan zien we wel weerKars schreef op vrijdag 14 oktober 2016 @ 11:26:
[...]
Voor mijn Emax motoren (MT2204-II Cooling 2300KV) zijn meerdere spec-sheets te vinden, waarbij de ene aangeeft 2-3S en de andere 2-4S... Maar ik heb al gelezen dat deze prima op 4S kunnen
Welke motoren heb je precies?
- Kars
- Registratie: November 2010
- Laatst online: 11:31
:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
Even snel opgezocht, maar deze motoren kunnen prima 4S aanklaaz schreef op vrijdag 14 oktober 2016 @ 11:58:
[...]
Geen kwalitatief hoogwaardige denk ik. Ik dacht eerst maar iets bij elkaar verzamelen zodat ik kan beginnen, dan kennis opbouwen en dan zien we wel weer
1-7-4-10-2-8-6-12-3-9-5-11
Een poosje terug zag ik de DJI Mavic Pro voorbij komen in een vlog. Mooi compact, mooie beelden en ontzettend gaaf apparaat. Tegelijkertijd voor het geld ook complete overkill voor een beginner als ik.
Vandaag zag ik per toeval dit topic voorbij gekomen en heb ik in één ruk de openingspost doorgelezen, heerlijke bak info en gelijk weer met beide voeten op aarde gezet, want er is nog een lange weg te gaan. Dat terwijl het wel kriebelt om zelf gelijk maar allemaal componenten te kopen en te gaan hobby'en.
Mij kennende beland het dan al snel in de kast als het niet lukt, dus daarom maar eens beginnen met een kant en klaar apparaat voor niet teveel geld.
In de openingspost wordt de Hubsan X4 genoemd als prima beginners drone, mooi bedrag ook om eens mee te spelen. Is dit nog steeds "the one to have" voor een absolute beginner zoals mij of zijn er voor ongeveer hetzelfde geld (<100eu) ook nog andere/betere alternatieven.
EDIT: ik zal heel eerlijk zeggen dat ik nog niet toe ben gekomen aan de overige 129 pagina's (en deel 1 van dit topic) dat ga ik de komende avonden even doorspitten
Vandaag zag ik per toeval dit topic voorbij gekomen en heb ik in één ruk de openingspost doorgelezen, heerlijke bak info en gelijk weer met beide voeten op aarde gezet, want er is nog een lange weg te gaan. Dat terwijl het wel kriebelt om zelf gelijk maar allemaal componenten te kopen en te gaan hobby'en.
Mij kennende beland het dan al snel in de kast als het niet lukt, dus daarom maar eens beginnen met een kant en klaar apparaat voor niet teveel geld.
In de openingspost wordt de Hubsan X4 genoemd als prima beginners drone, mooi bedrag ook om eens mee te spelen. Is dit nog steeds "the one to have" voor een absolute beginner zoals mij of zijn er voor ongeveer hetzelfde geld (<100eu) ook nog andere/betere alternatieven.
EDIT: ik zal heel eerlijk zeggen dat ik nog niet toe ben gekomen aan de overige 129 pagina's (en deel 1 van dit topic) dat ga ik de komende avonden even doorspitten
[ Voor 8% gewijzigd door B-Real op 14-10-2016 14:40 ]
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 24-07 08:37
Prrrr bleep boem!
/u/446870/crop5db0017462e30.png?f=community)
Een Eachine H8 mini kan ook, daar ben ik ook mee begonnen.B-Real schreef op vrijdag 14 oktober 2016 @ 14:37:
In de openingspost wordt de Hubsan X4 genoemd als prima beginners drone, mooi bedrag ook om eens mee te spelen. Is dit nog steeds "the one to have" voor een absolute beginner zoals mij of zijn er voor ongeveer hetzelfde geld (<100eu) ook nog andere/betere alternatieven.
Synthpop muziek: https://soundcloud.com/boppeaux
- Louw Post
- Registratie: Februari 2006
- Laatst online: 11:20
Cerenas
:strip_icc():strip_exif()/u/168777/crop68f8f033b4e5f_cropped.jpg?f=community)
Ondertussen aardig wat filmpjes gezien met drones op youtube en daardoor interesse gekregen om zelf ook hiermee te beginnen. Ik heb wat research gedaan naar onderstaande drones:
- Overmax X-bee drone 7.1
- Syma X8HG
De Syma lijkt me een leuke drone en heb ik vele filmpjes op youtube over kunnen vinden, maar van de Overmax (die iets geavenceerder lijkt) zijn alleen wat Poolse filmpjes te vinden.
De pluspunten van de Overmax zijn dat er een op afstandbestuurbare gimbal op zit en hij met een koffer komt. Nou had ik zelf wel het idee om mijn Xiaomi Yi action camera erop te zetten en dat is voor zover ik kon vinden op beide mogelijk (eventueel met een andere gimbal).
Nu ben ik een totale beginner dus ik vraag me überhaupt af of dit handige keuzes zijn en verder vraag ik me af welke van deze drones een goed begin zou kunnen zijn?
Betreffende Syma zag ik in dit topic dat er vaak gelinkt werd naar Chineze websites, maar ik ben een beetje gebonden aan Bol.com door een waardebon haha.
- Overmax X-bee drone 7.1
- Syma X8HG
De Syma lijkt me een leuke drone en heb ik vele filmpjes op youtube over kunnen vinden, maar van de Overmax (die iets geavenceerder lijkt) zijn alleen wat Poolse filmpjes te vinden.
De pluspunten van de Overmax zijn dat er een op afstandbestuurbare gimbal op zit en hij met een koffer komt. Nou had ik zelf wel het idee om mijn Xiaomi Yi action camera erop te zetten en dat is voor zover ik kon vinden op beide mogelijk (eventueel met een andere gimbal).
Nu ben ik een totale beginner dus ik vraag me überhaupt af of dit handige keuzes zijn en verder vraag ik me af welke van deze drones een goed begin zou kunnen zijn?
Betreffende Syma zag ik in dit topic dat er vaak gelinkt werd naar Chineze websites, maar ik ben een beetje gebonden aan Bol.com door een waardebon haha.
- Kars
- Registratie: November 2010
- Laatst online: 11:31
De Overmax is deze:
Kai-Deng K70
Hier met FPV scherm:
Kai-Deng K70F
-edit-
Mijn god zeg, die prijzen bij bol.com gaan nergens over...
https://www.bol.com/nl/p/...01/?suggestionType=browse


Kai-Deng K70
Hier met FPV scherm:
Kai-Deng K70F
-edit-
Mijn god zeg, die prijzen bij bol.com gaan nergens over...
https://www.bol.com/nl/p/...01/?suggestionType=browse
[ Voor 62% gewijzigd door Kars op 14-10-2016 15:45 ]
1-7-4-10-2-8-6-12-3-9-5-11
- lasharor
- Registratie: December 2004
- Laatst online: 14:59
7 december 2004
Die MT2204-II zijn een vervolg op die eerste generatie emax motoren. Die het trouwens ook prima doen op 4S. Die dingen zijn echt niet kapot te krijgen.Kars schreef op vrijdag 14 oktober 2016 @ 11:26:
[...]
Voor mijn Emax motoren (MT2204-II Cooling 2300KV) zijn meerdere spec-sheets te vinden, waarbij de ene aangeeft 2-3S en de andere 2-4S... Maar ik heb al gelezen dat deze prima op 4S kunnen
Welke motoren heb je precies?
- Louw Post
- Registratie: Februari 2006
- Laatst online: 11:20
Cerenas
Shit heyKars schreef op vrijdag 14 oktober 2016 @ 15:13:
De Overmax is deze:
Kai-Deng K70
Hier met FPV scherm:
Kai-Deng K70F
-edit-
Mijn god zeg, die prijzen bij bol.com gaan nergens over...
https://www.bol.com/nl/p/...01/?suggestionType=browse
- Kars
- Registratie: November 2010
- Laatst online: 11:31
Ja gewoon via China doen. Dit prijsverschil is gewoon bizar...Louw Post schreef op vrijdag 14 oktober 2016 @ 16:19:
[...]
Shit hey, dat is een flink prijs verschil. Is het aan te raden dat ding gewoon uit China te halen? Het lijkt me dat er nog importkosten door PostNL (oid) achteraf er nog eens bij gegooid worden.
Wel gratis verzending kiezen, dan duurt het langer (tot 20 werkdagen) maar is de kans veel kleiner op importkosten.
1-7-4-10-2-8-6-12-3-9-5-11
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
:strip_icc():strip_exif()/u/141461/crop5e2b6cc42ec35_cropped.jpeg?f=community)
Ik kies altijd voor de goedkoopste verzend optie. Is wat sneller (laatste tijd echt snel trouwens!) en je krijgt een track & trace code. Die pakketjes worden er ook eigenlijk nooit tussenuit gepikt.
Alleen die pakketten dia via de duurdere verzendopties worden verzonden hebben pakkans maar dat kan je afkopen bij Banggood met tarrif ensurance. Is best prijzig maar goedkoper dan de eventuele belasting.
Ik heb net even voor de deur gevlogen met de QX90 trouwens. Leuk dingetje! Alleen moeten er wel echt andere props op...dat hoorde ik mensen overal al zeggen en men raadt de Walkera Ladybird aan maar 5 paar is duurder dan 10 paar 5x4x3 KingKong props.  Wilde eerst even kijken of het echt zo kut is want ik heb nog heel veel reserve props van de Hubsan liggen en dat zijn dezelfde die met de Eachine meegeleverd worden maar ja ze zijn echt kut. Schieten er at random vanaf en als je wat actief remt of draait gaat de quad schudden als een idioot en heeft veel moeite weer op power te komen. Toch maar een doosje Ladybirds bestellen dus. Het binden met mijn i6 ging ook niet zonder slag of stoot trouwens. Netjes de procedure gevolgd maar wilde niet binden...de truc was om te binden, dan de op de transmitter AFHDS2 aan zetten (wat uit moet) en vervolgens weer uit zetten. Sinds dien pakt ie hem gewoon...heel apart maar goed, wellicht een bug in de custom firmware maar het werkt.
Wilde eerst even kijken of het echt zo kut is want ik heb nog heel veel reserve props van de Hubsan liggen en dat zijn dezelfde die met de Eachine meegeleverd worden maar ja ze zijn echt kut. Schieten er at random vanaf en als je wat actief remt of draait gaat de quad schudden als een idioot en heeft veel moeite weer op power te komen. Toch maar een doosje Ladybirds bestellen dus. Het binden met mijn i6 ging ook niet zonder slag of stoot trouwens. Netjes de procedure gevolgd maar wilde niet binden...de truc was om te binden, dan de op de transmitter AFHDS2 aan zetten (wat uit moet) en vervolgens weer uit zetten. Sinds dien pakt ie hem gewoon...heel apart maar goed, wellicht een bug in de custom firmware maar het werkt.
Verder vliegt ie best wel vet eigenlijk en het beeld en signaal is meer dan prima te noemen. Ik heb een pleintje voor de deur met 2 bomen en 4 lantaarnpalen wat een prima parcours is haha. Er fietsten wat mensen voorbij die stopten en raar stonden te kijken wat ik aan het doen was. Ik zag hun door de goggles stoppen met de fiets en naar mij kijken en dan elkaar aankijken van wtf is die gast aan het doen dan met die doos op z'n kop. En dan komt er zo'n oversized mug voorbij met allemaal knipperende lampjes en toen reden ze weer door.
Op de binnenplaats is nog wat te lastig voor mij om te vliegen. Er staat een boom in het midden en het is toch best smal dus ik hing al direct in die boom...hij is gelukkig niet zo hoog maar was wel een reden om dus naar de voorkant te verhuizen alleen daar waait het weer een stuk meer. Ik heb trouwens alleen nog even in angle gevlogen. Airmode wil ik toch iets meer ruimte hebben zonder verkeer of geparkeerde auto's in de buurt maar ik vind hem zeker niet geschikt voor in huis, daar is ie imo gewoon te snel voor.
Alleen die pakketten dia via de duurdere verzendopties worden verzonden hebben pakkans maar dat kan je afkopen bij Banggood met tarrif ensurance. Is best prijzig maar goedkoper dan de eventuele belasting.
Ik heb net even voor de deur gevlogen met de QX90 trouwens. Leuk dingetje!
Verder vliegt ie best wel vet eigenlijk en het beeld en signaal is meer dan prima te noemen. Ik heb een pleintje voor de deur met 2 bomen en 4 lantaarnpalen wat een prima parcours is haha. Er fietsten wat mensen voorbij die stopten en raar stonden te kijken wat ik aan het doen was. Ik zag hun door de goggles stoppen met de fiets en naar mij kijken en dan elkaar aankijken van wtf is die gast aan het doen dan met die doos op z'n kop.
Op de binnenplaats is nog wat te lastig voor mij om te vliegen. Er staat een boom in het midden en het is toch best smal dus ik hing al direct in die boom...hij is gelukkig niet zo hoog maar was wel een reden om dus naar de voorkant te verhuizen alleen daar waait het weer een stuk meer. Ik heb trouwens alleen nog even in angle gevlogen. Airmode wil ik toch iets meer ruimte hebben zonder verkeer of geparkeerde auto's in de buurt maar ik vind hem zeker niet geschikt voor in huis, daar is ie imo gewoon te snel voor.
Vandaag had ik even een facepalm momentje.
Nadat ik mijn quad weer helemaal in elkaar had zitten dacht ik "even" een testvluchtje te maken achter 't huis. Resultaat is 1 kapotte prop en een quad die op z'n kop lag.
2 dagen later de moed weer bij elkaar om nog een test te doen op een klein grasveldje. Wederom hetzelfde resultaat. Ik had ondertussen wel opnieuw gecalibreerd, dus dat was niet het probleem.
Vanavond maar eens alles nagekeken, blijkt dat ik met het aansluiten van m'n motoren op de FC, de quad naar me toe gericht had staan. Dus motor 1 was 4, 2 was 3, etc .... 
Het is nu te laat om te testen, dus morgen maar eens opnieuw proberen.
Nadat ik mijn quad weer helemaal in elkaar had zitten dacht ik "even" een testvluchtje te maken achter 't huis. Resultaat is 1 kapotte prop en een quad die op z'n kop lag.
2 dagen later de moed weer bij elkaar om nog een test te doen op een klein grasveldje. Wederom hetzelfde resultaat. Ik had ondertussen wel opnieuw gecalibreerd, dus dat was niet het probleem.
Vanavond maar eens alles nagekeken, blijkt dat ik met het aansluiten van m'n motoren op de FC, de quad naar me toe gericht had staan. Dus motor 1 was 4, 2 was 3, etc ....
Het is nu te laat om te testen, dus morgen maar eens opnieuw proberen.
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Heb ik ook gehad. Ik had mijn FPV setup van mijn ouders gekregen voor mijn verjaardag en ik helemaal tros alles in elkaar gezet, laptop mee het veld in om eventueel iets in de settings mee te kunnen doen omdat ik toen net van Cleanflight naar Betaflight was overgestapt en ja hoor, bam koprol en geen idee wat er aan de hand was....Ik denk nou dan sluit ik hem even aan op de laptop om te kijken wat er loos is, was ik mijn USB kabel vergeten....half uur voor niks gereden.Jodel schreef op vrijdag 14 oktober 2016 @ 22:53:
Vandaag had ik even een facepalm momentje.
Nadat ik mijn quad weer helemaal in elkaar had zitten dacht ik "even" een testvluchtje te maken achter 't huis. Resultaat is 1 kapotte prop en een quad die op z'n kop lag.
2 dagen later de moed weer bij elkaar om nog een test te doen op een klein grasveldje. Wederom hetzelfde resultaat. Ik had ondertussen wel opnieuw gecalibreerd, dus dat was niet het probleem.
Vanavond maar eens alles nagekeken, blijkt dat ik met het aansluiten van m'n motoren op de FC, de quad naar me toe gericht had staan. Dus motor 1 was 4, 2 was 3, etc ....
Het is nu te laat om te testen, dus morgen maar eens opnieuw proberen.
- Chrisiesmit93
- Registratie: Februari 2009
- Laatst online: 02-08 10:07
Iemand nog belang bij een FrSky Taranis X9D Plus met extra (Turnigy) accu?
V&A aangeboden: FrSky Taranis X9D Plus
V&A aangeboden: FrSky Taranis X9D Plus
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Ik heb je een pm gestuurd.Chrisiesmit93 schreef op zaterdag 15 oktober 2016 @ 13:26:
Iemand nog belang bij een FrSky Taranis X9D Plus met extra (Turnigy) accu?
V&A aangeboden: FrSky Taranis X9D Plus
Mijn spulletjes op de nieuwe motoren na zijn er trouwens. Nu even met vriendin lief de stad in en dan lekker klussen!
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
Pff vandaag eindelijk m'n RunCam binnen van Banggood. Mobius cam verloren nadat ik een accu had leeggevlogen met m'n goggles op. Niets van gemerkt helaas.. Blijkt die RunCam gewoon kaput.
Maar even een mailtje richting Banggood dan maar..
Wanneer ik een nieuwe heb post ik hier wat actiebeelden
Maar even een mailtje richting Banggood dan maar..
Wanneer ik een nieuwe heb post ik hier wat actiebeelden
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
De bedrading is klaar

klik voor high ress
Als ik dat nu vergelijk met mijn eerste keer.

En als ik het soldeerwerk vergelijk met de eerste keer...

Dan ben ik zeer tevreden met het resultaat!
Hij is ook weer 40 gram lichter geworden trouwens.
Weegt nu ~620 gram inc GoPro en batterij en ~370 zonder GoPro en batterij.
Toen ik hem voor het eerst bouwde woog ie 680 gram zonder FPV gear...maar dat was wel met de originele GoPro case en mount.
Ik heb wel nog een klein probleempje maar daar ga ik morgen weer mee verder.
Als ik de stroom aansluit gaat de buzzer piepen, echt heel hard en irritant.
Ik heb de buzzer op aan AUX1 toegewezen maar dat maakt geen verschil.
Misschien dat het aan het voltage ligt, ik heb VBAT nu niet aangesloten. Ik had er even niet aan gedacht dat ie dan niet kan gaan piepen als het voltage laag wordt dus dat moet ik morgen sowieso ook nog even doen.
Opgelost.
Na wat zoeken schijnt er een fout te zitten in het Clone board en moet je de buzzer rechtstreeks op de pads aan de onderkant solderen en dat klopt. Werkt nu precies zoals de buzzer van m'n oude Matek PDB.

klik voor high ress
Als ik dat nu vergelijk met mijn eerste keer.
En als ik het soldeerwerk vergelijk met de eerste keer...
Dan ben ik zeer tevreden met het resultaat!
Hij is ook weer 40 gram lichter geworden trouwens.
Weegt nu ~620 gram inc GoPro en batterij en ~370 zonder GoPro en batterij.
Toen ik hem voor het eerst bouwde woog ie 680 gram zonder FPV gear...maar dat was wel met de originele GoPro case en mount.
Ik heb wel nog een klein probleempje maar daar ga ik morgen weer mee verder.
Als ik de stroom aansluit gaat de buzzer piepen, echt heel hard en irritant.
Ik heb de buzzer op aan AUX1 toegewezen maar dat maakt geen verschil.
Misschien dat het aan het voltage ligt, ik heb VBAT nu niet aangesloten. Ik had er even niet aan gedacht dat ie dan niet kan gaan piepen als het voltage laag wordt dus dat moet ik morgen sowieso ook nog even doen.
Opgelost.
Na wat zoeken schijnt er een fout te zitten in het Clone board en moet je de buzzer rechtstreeks op de pads aan de onderkant solderen en dat klopt. Werkt nu precies zoals de buzzer van m'n oude Matek PDB.
[ Voor 43% gewijzigd door Radiance op 16-10-2016 00:57 ]
- MsG
- Registratie: November 2007
- Laatst online: 01-08 11:46
Forumzwerver
Ja die fout zit ook in de matek die ik heb. Tenzij je hem op een 3 weg-switch aansluit zag ik. Hij piept bij mij juist als de switch in de top positie staat, dat vind ik onhandig, want mijn zender wil dat ik alles omhoog zet als ik de zender aan doe. Even kijken hoe ik dat inverteer.
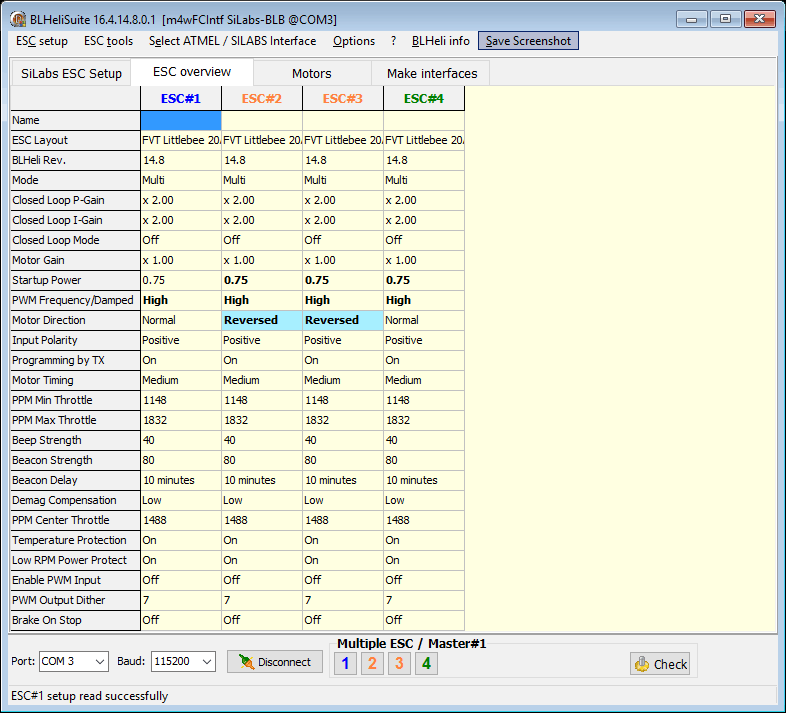
Net even een stukje gevlogen, nog wel wennen en hij oscilleert zichtbaar. Heb de ESC's ook even nagelopen, maar inhoudelijk zegt het me nog te weinig.
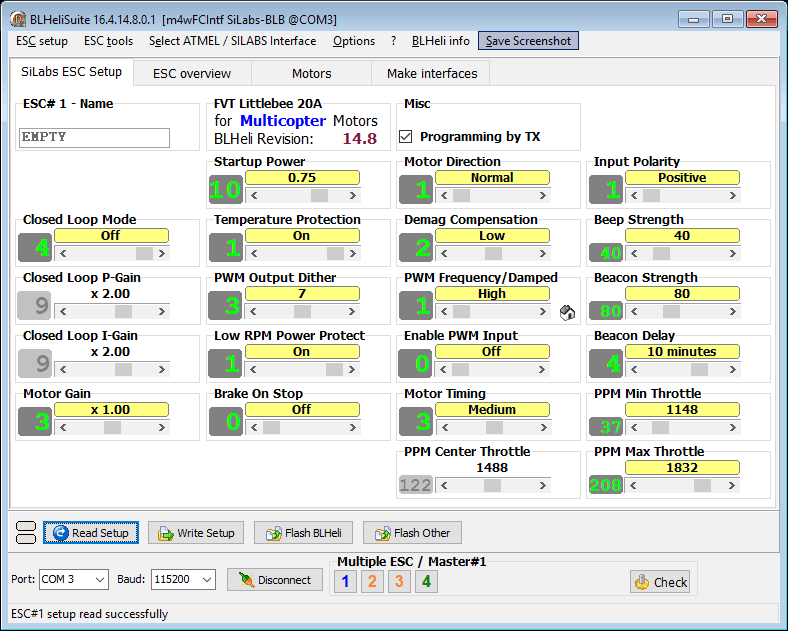
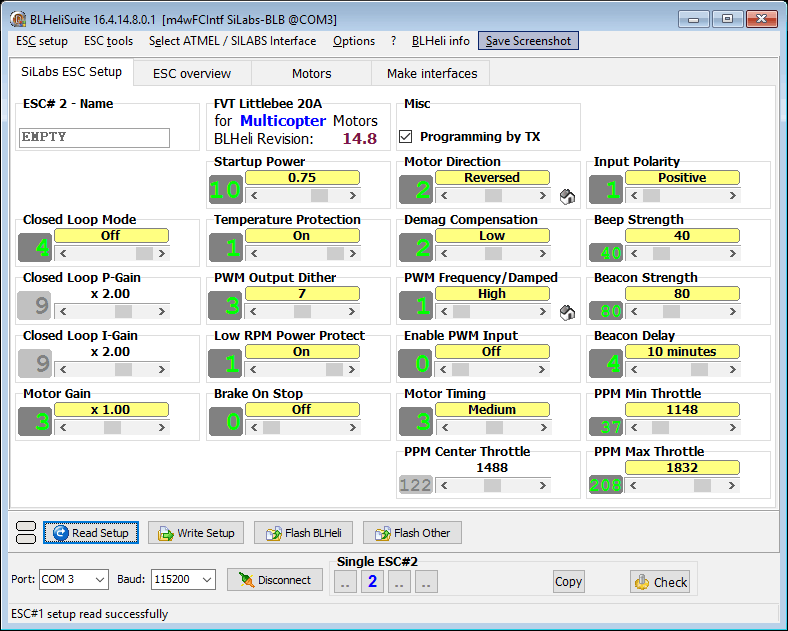
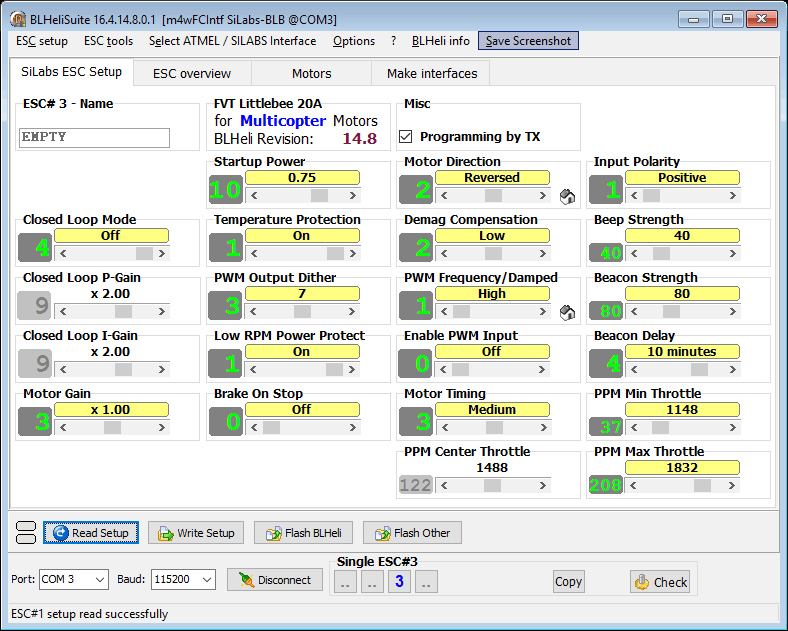
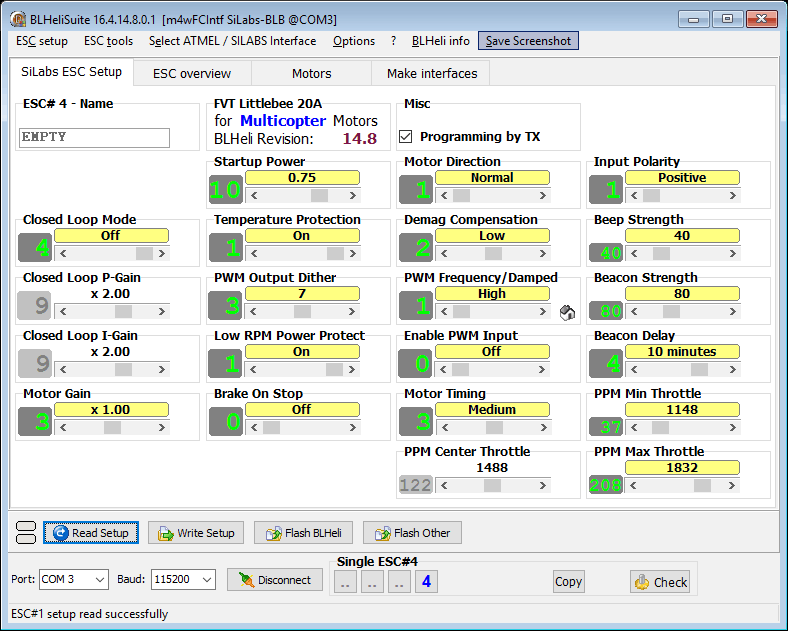
Als mensen gekke instellingen zien, roep maar even.
Daarnaast piept mijn accu die ik vanaf de storage mode al even heb gebruikt voor 2 hele korte vluchten. Hij moet nu dus opgeladen worden, maar als ik de handleidingen lees heb ik een hele bunker nodig, die ik helaas niet heb. Zwaar overdreven of doen jullie het allemaal wel in een of andere metalen koffer tijdens het laden? Of kan ik ze prima op m'n bureau laden en valt het reuze mee? Alternatief is mijn schuurtje, maar dan heb ik er compleet geen zicht op. Ik heb een Xbox 360 Adapter en een Turnigy 80 Watt balancer, dus geen hokkietokkie laadspul.
Daarnaast had ik de volgende vraag:
- Ik heb airmode nu even expliciet uitgezet, maar alsnog gaat hij bij het armen ook meteen draaien. Omdat mijn quad redelijk laag ligt wordt het dan een beetje een grasmaaier, waardoor ik liever even vanuit 0 throttle stijg ipv meteen als ik arm. Moet ik de min throttle dan gewoon op het theoretische 1000 zetten? Landen deed ik nu alsnog door hem te disarmen boven de grond, maar dan komt hij ook niet altijd even lekker neer. 1 x zelfs op z'n kant met de propellors in de grond.
Net even een stukje gevlogen, nog wel wennen en hij oscilleert zichtbaar. Heb de ESC's ook even nagelopen, maar inhoudelijk zegt het me nog te weinig.
Als mensen gekke instellingen zien, roep maar even
Daarnaast piept mijn accu die ik vanaf de storage mode al even heb gebruikt voor 2 hele korte vluchten. Hij moet nu dus opgeladen worden, maar als ik de handleidingen lees heb ik een hele bunker nodig, die ik helaas niet heb. Zwaar overdreven of doen jullie het allemaal wel in een of andere metalen koffer tijdens het laden? Of kan ik ze prima op m'n bureau laden en valt het reuze mee? Alternatief is mijn schuurtje, maar dan heb ik er compleet geen zicht op. Ik heb een Xbox 360 Adapter en een Turnigy 80 Watt balancer, dus geen hokkietokkie laadspul.
Daarnaast had ik de volgende vraag:
- Ik heb airmode nu even expliciet uitgezet, maar alsnog gaat hij bij het armen ook meteen draaien. Omdat mijn quad redelijk laag ligt wordt het dan een beetje een grasmaaier, waardoor ik liever even vanuit 0 throttle stijg ipv meteen als ik arm. Moet ik de min throttle dan gewoon op het theoretische 1000 zetten? Landen deed ik nu alsnog door hem te disarmen boven de grond, maar dan komt hij ook niet altijd even lekker neer. 1 x zelfs op z'n kant met de propellors in de grond.
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
Gebruik je Cleanflight? Zorg ervoor dat Motor_Stop, Oneshot125 en "disarm motors regardless of throttle value alledrie aan staan. In de CLI van Cleanflight moet je nog wel even de feature oneshot125 aanzetten zodat dit aanstaat voor je ESC's. Dit zorgt voor betere response. Zorg er ook voor dat damped mode aanstaat in je ESC's. Dit zorgt ook voor betere response. Veel oscillations is waarschijnlijk een kwestie van tuning van je PID's.
MsG schreef op zondag 16 oktober 2016 @ 16:42:
Ja die fout zit ook in de matek die ik heb. Tenzij je hem op een 3 weg-switch aansluit zag ik. Hij piept bij mij juist als de switch in de top positie staat, dat vind ik onhandig, want mijn zender wil dat ik alles omhoog zet als ik de zender aan doe. Even kijken hoe ik dat inverteer.
Net even een stukje gevlogen, nog wel wennen en hij oscilleert zichtbaar. Heb de ESC's ook even nagelopen, maar inhoudelijk zegt het me nog te weinig.
[afbeelding]
[afbeelding]
[afbeelding]
[afbeelding]
[afbeelding]
Als mensen gekke instellingen zien, roep maar even
Daarnaast piept mijn accu die ik vanaf de storage mode al even heb gebruikt voor 2 hele korte vluchten. Hij moet nu dus opgeladen worden, maar als ik de handleidingen lees heb ik een hele bunker nodig, die ik helaas niet heb. Zwaar overdreven of doen jullie het allemaal wel in een of andere metalen koffer tijdens het laden? Of kan ik ze prima op m'n bureau laden en valt het reuze mee? Alternatief is mijn schuurtje, maar dan heb ik er compleet geen zicht op. Ik heb een Xbox 360 Adapter en een Turnigy 80 Watt balancer, dus geen hokkietokkie laadspul.
Daarnaast had ik de volgende vraag:
- Ik heb airmode nu even expliciet uitgezet, maar alsnog gaat hij bij het armen ook meteen draaien. Omdat mijn quad redelijk laag ligt wordt het dan een beetje een grasmaaier, waardoor ik liever even vanuit 0 throttle stijg ipv meteen als ik arm. Moet ik de min throttle dan gewoon op het theoretische 1000 zetten? Landen deed ik nu alsnog door hem te disarmen boven de grond, maar dan komt hij ook niet altijd even lekker neer. 1 x zelfs op z'n kant met de propellors in de grond.
- MsG
- Registratie: November 2007
- Laatst online: 01-08 11:46
Forumzwerver
Ik gebruik betaflight. Maar dat komt in de basis op hetzelfde neer. Ik ga er naar kijken, bedankt.
LiPo ook maar aan de charger gegooid voor storage mode. De boel staat nog niet in de fik hier.
LiPo ook maar aan de charger gegooid voor storage mode. De boel staat nog niet in de fik hier.
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
In betaflight heb je dezelfde opties om aan te zetten inderdaad.
Wellicht handig om je beacon delay op wat minder minuten te zetten. Dit werkt als een soort beeper waneer je je quad kwijt bent. Tenzij je een beeper hebt gesoldeerd is dit niet nodig natuurlijk
Wellicht handig om je beacon delay op wat minder minuten te zetten. Dit werkt als een soort beeper waneer je je quad kwijt bent. Tenzij je een beeper hebt gesoldeerd is dit niet nodig natuurlijk
MsG schreef op zondag 16 oktober 2016 @ 18:23:
Ik gebruik betaflight. Maar dat komt in de basis op hetzelfde neer. Ik ga er naar kijken, bedankt.
LiPo ook maar aan de charger gegooid voor storage mode. De boel staat nog niet in de fik hier.
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Ik had hem ingesteld op de linker draaiknop boven op de i6. Die heb jij toch ook? Heb je dan ook de 10 channel mod al geïnstalleerd?MsG schreef op zondag 16 oktober 2016 @ 16:42:
Ja die fout zit ook in de matek die ik heb. Tenzij je hem op een 3 weg-switch aansluit zag ik. Hij piept bij mij juist als de switch in de top positie staat, dat vind ik onhandig, want mijn zender wil dat ik alles omhoog zet als ik de zender aan doe. Even kijken hoe ik dat inverteer.
Net even een stukje gevlogen, nog wel wennen en hij oscilleert zichtbaar. Heb de ESC's ook even nagelopen, maar inhoudelijk zegt het me nog te weinig.
[afbeelding]
[afbeelding]
[afbeelding]
[afbeelding]
[afbeelding]
Als mensen gekke instellingen zien, roep maar even
Daarnaast piept mijn accu die ik vanaf de storage mode al even heb gebruikt voor 2 hele korte vluchten. Hij moet nu dus opgeladen worden, maar als ik de handleidingen lees heb ik een hele bunker nodig, die ik helaas niet heb. Zwaar overdreven of doen jullie het allemaal wel in een of andere metalen koffer tijdens het laden? Of kan ik ze prima op m'n bureau laden en valt het reuze mee? Alternatief is mijn schuurtje, maar dan heb ik er compleet geen zicht op. Ik heb een Xbox 360 Adapter en een Turnigy 80 Watt balancer, dus geen hokkietokkie laadspul.
Daarnaast had ik de volgende vraag:
- Ik heb airmode nu even expliciet uitgezet, maar alsnog gaat hij bij het armen ook meteen draaien. Omdat mijn quad redelijk laag ligt wordt het dan een beetje een grasmaaier, waardoor ik liever even vanuit 0 throttle stijg ipv meteen als ik arm. Moet ik de min throttle dan gewoon op het theoretische 1000 zetten? Landen deed ik nu alsnog door hem te disarmen boven de grond, maar dan komt hij ook niet altijd even lekker neer. 1 x zelfs op z'n kant met de propellors in de grond.
Die draaiknoppen hoeven niet helemaal naar links te staan als je de zender aanzet.
De lost plane finder van de Matek werkte bij mij prima. Uit als je de batterij er in stopt en piepen als het signaal weg valt of als ik de draaiknop dicht draaide.
De fout met de buzzer op mijn FC zit hem in het feit dat het stekkertje voor de buzzer continue een spanning geeft waardoor ie niet uit gaat. Als je hem rechtstreeks op de buzzer pads soldeerd aan de onderkant van het bord is dat probleem verholpen en stuurt de FC hem correct aan.
Wat het laden betreft doe ik gewoon in de woonkamer op de grond in een ovenschaal en blijf er continue bij.
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
Arming had ik idd ook eerst op de linker draaiknop omdat ik dacht dat die aux kanalen van die i6 niet aan te passen waren. Dit is dus mogelijk op de meest vage manier. Cancel even ingedrukt houden na correct zetten van de aux channels waarna de RC piept en de aux channels heeft opgeslagen
Radiance schreef op zondag 16 oktober 2016 @ 18:27:
[...]
Ik had hem ingesteld op de linker draaiknop boven op de i6. Die heb jij toch ook? Heb je dan ook de 10 channel mod al geïnstalleerd?
Die draaiknoppen hoeven niet helemaal naar links te staan als je de zender aanzet.
De lost plane finder van de Matek werkte bij mij prima. Uit als je de batterij er in stopt en piepen als het signaal weg valt of als ik de draaiknop dicht draaide.
De fout met de buzzer op mijn FC zit hem in het feit dat het stekkertje voor de buzzer continue een spanning geeft waardoor ie niet uit gaat. Als je hem rechtstreeks op de buzzer pads soldeerd aan de onderkant van het bord is dat probleem verholpen en stuurt de FC hem correct aan.
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Arm heb ik heb op de meest rechter switch en de beeper dus op de linker draaiknop. Ik heb wel die 10 channel mod geïnstalleerd dus ik kan alle switches en knoppen een functie toewijzen in Betaflight.B_sHoRtY schreef op zondag 16 oktober 2016 @ 18:30:
Arming had ik idd ook eerst op de linker draaiknop omdat ik dacht dat die aux kanalen van die i6 niet aan te passen waren. Dit is dus mogelijk op de meest vage manier. Cancel even ingedrukt houden na correct zetten van de aux channels waarna de RC piept en de aux channels heeft opgeslagen
[...]
Linker switch: failsafe
2e van links: Blackbox aan/uit
3 way switch: angle/horizon/airmode
Rechter switch: arm
Draaiknop links: beeper aan/uit
Draaiknop rechts: failsafe
Die laatste heb ik dat zodra het signaal wegvalt de RX een 1000 commando stuurt naar de FC die daarop dus failsafe inschakelt.
De draaiknoppen staan altijd helemaal open gedraait. Wil ik dat ie gaat piepen draai ik de linker dicht en als het signaal verloren gaat stuurt de RX naar de FC dat de rechter draaiknop dicht staat. Dit was de enigste manier om de motoren te laten stoppen bij het verlies van signaal, anders bleven de motoren in Airmode op de min throttle waarde draaien.
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
Vandaag een stukje gevlogen met mijn Phantom 3 Advanced in P-mode. Op 800 meter afstand, en 100 meter hoogte merkte ik dat er iets mis ging, doordat ik even de arm van mijn drone in beeld zag.
Meteen ben ik omgekeert in de RTH mode, en heb zo veel mogelijk hoogte eruit proberen te halen voor het geval van een crash of bepaalde wind lag in de lucht.
Na ongeveer 1 minuut begon de drone om zijn eigen as te draaien, en verloor met een snelheid van 15m/s hoogte.
Gelukkig kwam hij op zijn kop terecht in het gras, en is hij niet van hoog gevallen.
Na een inpectie was er geen zichtbaare schade, en de drone kreeg ook meteen verbinding met de remote.
Ik heb toen meteen mijn flight recorder geback-upt naar de pc.
Gecheckt of de drone het nog deed naar een compass calibratie.
Nu waneer ik hover tussen de 2 en de 5 meter hoogte, zie ik dat de drone erg instabiel beweegt, schokkerig in de lucht. En af en toe de neiging er vandoor te gaan. (neighing naar een fly away)
Ook na de IMU gecalibreert te hebben blijft het problem zich voordoen.
Ik heb de drone sinds 31 Augustus 2016.
72 keer gevlogen in total 12 HR 53 Min 277.177 Meter
Nu wil ik mijn drone laten repareren , hoe gaat dit in zijn werking.
Meteen ben ik omgekeert in de RTH mode, en heb zo veel mogelijk hoogte eruit proberen te halen voor het geval van een crash of bepaalde wind lag in de lucht.
Na ongeveer 1 minuut begon de drone om zijn eigen as te draaien, en verloor met een snelheid van 15m/s hoogte.
Gelukkig kwam hij op zijn kop terecht in het gras, en is hij niet van hoog gevallen.
Na een inpectie was er geen zichtbaare schade, en de drone kreeg ook meteen verbinding met de remote.
Ik heb toen meteen mijn flight recorder geback-upt naar de pc.
Gecheckt of de drone het nog deed naar een compass calibratie.
Nu waneer ik hover tussen de 2 en de 5 meter hoogte, zie ik dat de drone erg instabiel beweegt, schokkerig in de lucht. En af en toe de neiging er vandoor te gaan. (neighing naar een fly away)
Ook na de IMU gecalibreert te hebben blijft het problem zich voordoen.
Ik heb de drone sinds 31 Augustus 2016.
72 keer gevlogen in total 12 HR 53 Min 277.177 Meter
Nu wil ik mijn drone laten repareren , hoe gaat dit in zijn werking.
Ben niet slim, maar wel dom
- MsG
- Registratie: November 2007
- Laatst online: 01-08 11:46
Forumzwerver
Ja ik heb de 10 channel firmware, maar niks met de ontvanger gedaan. Als je daadwerkelijk 10 channel wilde moest je daar ook wat mee doen volgens mij. Draaiknop zal ik nog even mee spelen, daar mekkert de zender wellicht niet over, als die niet op 0 staat bij het aan doen.Radiance schreef op zondag 16 oktober 2016 @ 18:27:
[...]
Ik had hem ingesteld op de linker draaiknop boven op de i6. Die heb jij toch ook? Heb je dan ook de 10 channel mod al geïnstalleerd?
Die draaiknoppen hoeven niet helemaal naar links te staan als je de zender aanzet.
De lost plane finder van de Matek werkte bij mij prima. Uit als je de batterij er in stopt en piepen als het signaal weg valt of als ik de draaiknop dicht draaide.
De fout met de buzzer op mijn FC zit hem in het feit dat het stekkertje voor de buzzer continue een spanning geeft waardoor ie niet uit gaat. Als je hem rechtstreeks op de buzzer pads soldeerd aan de onderkant van het bord is dat probleem verholpen en stuurt de FC hem correct aan.
Wat het laden betreft doe ik gewoon in de woonkamer op de grond in een ovenschaal en blijf er continue bij.
Zie ik trouwens goed dat jij de motordraden niet rechtstreeks aan de ESC soldeert, maar er nog iets tussen doet? Is dat om de ESC intact te houden?
Denk om uw spatiegebruik. Dit scheelt Tweakers.net kostbare databaseruimte! | Groninger en geïnteresseerd in Domotica? Kom naar DomoticaGrunn
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Als je de ia6b receiver hebt en via ibus aansluit hoef je niets te veranderen en heb je 10 kanalen. Ik heb ook niets met de receiver gedaan.MsG schreef op zondag 16 oktober 2016 @ 20:39:
[...]
Ja ik heb de 10 channel firmware, maar niks met de ontvanger gedaan. Als je daadwerkelijk 10 channel wilde moest je daar ook wat mee doen volgens mij. Draaiknop zal ik nog even mee spelen, daar mekkert de zender wellicht niet over, als die niet op 0 staat bij het aan doen.
Zie ik trouwens goed dat jij de motordraden niet rechtstreeks aan de ESC soldeert, maar er nog iets tussen doet? Is dat om de ESC intact te houden?
Nee de positie van de draaiknoppen maken niet uit met het aanzetten van de transmitter. Alleen de switches en sticks geven die error.
Dit zijn nog mijn oude motoren die ik ga vervangen. Die had ik er alleen op gelaten om de afstand van de ESC te bepalen. Ik zal de motor wel rechtstreeks op de ESC moeten solderen want deze ESC hebben alleen pads aan de motor kant, geen draden dus. Ideaal als je het mij vraagt.
Ik heb inderdaad een paar stukjes foam tussen de ESC en het frame zitten. Ik heb dat foam gebruikt waar de pakketjes van Banggood in gewikkeld zijn.
Ik las laatst ook een interessant stuk wat inmiddels is opgenomen in de Betaflight wiki over een paar laagjes isolatie tape tussen de motoren en de armen. Dit om vibraties te verminderen bij de bron van de vibraties, de motoren. Dit komt dan de vlieg eigenschappen weer ten goede en heb je minder snel last van oscillates tijdens het vliegen en hoef je er dus minder uit te filteren met de software matige filters en je hoeft je FC minder te snel te softmounten.
Zeker met de hogere kv motoren schijnt dit vaak de makkelijkste oplossing te zijn tegen oscillaties.
Het stukje wat ik bedoel kan je hier vinden:
https://github.com/betafl...ions-how-do-I-solve-this-
En dan even deze regel op de pagina zoeken:
Another solution by Race Miata (posted in the BLHeli_S thread)
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
Video van de crash
oorzaak nog onbekend, ga het nu laten repareren door garantie
oorzaak nog onbekend, ga het nu laten repareren door garantie
Ben niet slim, maar wel dom
- lasharor
- Registratie: December 2004
- Laatst online: 14:59
7 december 2004
Ding reageert mega instabiel en nog vlieg je gewoon door.itcouldbeanyone schreef op zondag 16 oktober 2016 @ 21:36:
Video van de crash
oorzaak nog onbekend, ga het nu laten repareren door garantie
[video]
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
de eerste keer dat het gebeurde dacht ik dat het een windvlaag was, is vaker gebeurt dan zie je ook even kort je propellor.lasharor schreef op zondag 16 oktober 2016 @ 22:05:
[...]
Ding reageert mega instabiel en nog vlieg je gewoon door.
op het moment dat ik daar stond werd het probleem pas duidelijk waneer hij echt ver naar voren neigde.
ik heb daarna ook meteen veel hoogte proberen te verliezen, om de impact van een crash te verlichten.
als ik daar plaatselijk was gaan landen was de schade veel groter geweest dan dat dat nu is.
de drone heeft geen zichtbare schade, en vliegt nog steeds, maar het probleem van het filmpje doet zich nog voor, hij reageert erg instabiel, shockerig waneer ik hem laat hoveren op 2 a 5 meter hoogte.
Hier is mijn flight log
http://healthydrones.com/main?share=KuownR
[ Voor 16% gewijzigd door itcouldbeanyone op 17-10-2016 03:53 ]
Ben niet slim, maar wel dom
- SG
- Registratie: Januari 2001
- Laatst online: 29-07 11:50
Trillingen kunnen prop en of motor onbalans zijn.
Voor props heb balanser hulp middel. En onbalans kan je testen door gyro accelmeter output te volgen bij motor test.
Ik heb tot nu to geen last van. Maar heb al silicon M3 o- ringen
En silicon M3 standoff.
Zelf zou ik eerder de FC mount dempen.
Ik balanseer de props niet.
Maar andere piloot wel. Dus wat tape op de prop als balans gewicht.
Mijn ZMR250 deed ook raar , maar vertrouwen in SP Racer Pro Evo FC is weg gezien ervaringen online en mede piloten.
Dus misschien toch maar de Cyclone FC gebruiken.
Voor props heb balanser hulp middel. En onbalans kan je testen door gyro accelmeter output te volgen bij motor test.
Ik heb tot nu to geen last van. Maar heb al silicon M3 o- ringen
En silicon M3 standoff.
Zelf zou ik eerder de FC mount dempen.
Ik balanseer de props niet.
Maar andere piloot wel. Dus wat tape op de prop als balans gewicht.
Mijn ZMR250 deed ook raar , maar vertrouwen in SP Racer Pro Evo FC is weg gezien ervaringen online en mede piloten.
Dus misschien toch maar de Cyclone FC gebruiken.
X399 Taichi; ThreadRipper 1950X; 32GB; VEGA 56; BenQ 32" 1440P | Gigbyte; Phenom X4 965; 8GB; Samsung 120hz 3D 27" | W2012SER2; i5 quadcore | Mac mini 2014 | ATV 4g | ATV 4K
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Ik was ook een beetje aan het kijken welke FC is in mijn toekomstige build wil gaan gebruiken.SG schreef op maandag 17 oktober 2016 @ 07:41:
Trillingen kunnen prop en of motor onbalans zijn.
Voor props heb balanser hulp middel. En onbalans kan je testen door gyro accelmeter output te volgen bij motor test.
Ik heb tot nu to geen last van. Maar heb al silicon M3 o- ringen
En silicon M3 standoff.
Zelf zou ik eerder de FC mount dempen.
Ik balanseer de props niet.
Maar andere piloot wel. Dus wat tape op de prop als balans gewicht.
Mijn ZMR250 deed ook raar , maar vertrouwen in SP Racer Pro Evo FC is weg gezien ervaringen online en mede piloten.
Dus misschien toch maar de Cyclone FC gebruiken.
Mijn ook was in eerste instantie gevallen op de Evo maar las hier inderdaad niet veel goeds over.
Ik nijg nu erg naar deze FC:
http://www.fpvmodel.com/x...ght-controller_g1106.html
Ik zit me ook te verdiepen in de F4 bordjes maar daar zitten wat mij betreft nog teveel haken en ogen aan op dit moment.
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
Er wordt wel eens gebruik gemaakt van bullet pins tussen de motor draden en de ESC's. Ben er persoonlijk geen fan van omdat dit niet altijd een stabiele connectie is. Persoonlijk vind ik het prettig om m'n motor draden op maat te knippen, te strippen en rechtstreeks op de ESC's te solderen met een stuk heatshrink er overheen. Daarna tape ik de ESC's aan de armen vast. De plus en aardedraad soldeer ik meestal ook los omdat deze vaak te kort zijn. Ik knip nieuwe draden op maat en vervolgens op de PDB.
MsG schreef op zondag 16 oktober 2016 @ 20:39:
[...]
Ja ik heb de 10 channel firmware, maar niks met de ontvanger gedaan. Als je daadwerkelijk 10 channel wilde moest je daar ook wat mee doen volgens mij. Draaiknop zal ik nog even mee spelen, daar mekkert de zender wellicht niet over, als die niet op 0 staat bij het aan doen.
Zie ik trouwens goed dat jij de motordraden niet rechtstreeks aan de ESC soldeert, maar er nog iets tussen doet? Is dat om de ESC intact te houden?
:strip_icc():strip_exif()/u/355097/c4d.jpg?f=community)
Wat precies? De RF betas zijn inmiddels erg stabiel.[b][message=48758437,noline]
Ik zit me ook te verdiepen in de F4 bordjes maar daar zitten wat mij betreft nog teveel haken en ogen aan op dit moment.
psn: lupusergo
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Het gaat niet zo zeer om de firmware maar inverted sbus signaal wat nog niet altijd lekker werkt of vbat en led aansluitingen die niet (goed) werken.
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 24-07 08:37
Prrrr bleep boem!
Ik heb even een paar vluchten opgenomen.Sensei_D schreef op donderdag 06 oktober 2016 @ 09:28:
[...]
SweeetttZat zelf te kijken naar de 160 versie. Ben echter wel nieuwsgierig hoe lang die het volhoud, is een echter racer, geen basher. En ik bash nog
Maarruh, filmpies! Echt mooi ding man.
Dit was m'n 3e vlucht die resulteerde in een crash
Ik moet nog even wat meer wennen aan 5 inch props.
Alles is nog heel op 2 plastic standoffs na.
[YouTube: https://www.youtube.com/watch?v=KcjU_rNy0rw]
Synthpop muziek: https://soundcloud.com/boppeaux
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Nice! Al scheelt gras natuurlijk wel aanzienlijk, maar de armpjes houden het dus wel uit. En neem gewoon meteen alu stand-offsnoobgrinder schreef op maandag 17 oktober 2016 @ 11:34:
[...]
Ik heb even een paar vluchten opgenomen.
Dit was m'n 3e vlucht die resulteerde in een crash
Ik moet nog even wat meer wennen aan 5 inch props.
Alles is nog heel op 2 plastic standoffs na.
Je hebt trouwens wel serieuze oversaturation, vliegen in HDR ja?
[ Voor 7% gewijzigd door Sensei_D op 17-10-2016 15:38 ]
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 24-07 08:37
Prrrr bleep boem!
Ja, het beeld is nu niet zo best, ik had m'n OSD bordje niet mee om het aan te passen.Sensei_D schreef op maandag 17 oktober 2016 @ 15:37:
[...]
Nice! Al scheelt gras natuurlijk wel aanzienlijk, maar de armpjes houden het dus wel uit. En neem gewoon meteen alu stand-offs
Je hebt trouwens wel serieuze oversaturation, vliegen in HDR ja?
Ik heb maar gewoon 3cm lange schroeven besteld, dan heb ik helemaal geen plastic standoffs meer nodig
Synthpop muziek: https://soundcloud.com/boppeaux
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Haha, nice. Wat vloog je hiervoor eigenlijk dan, als je zegt dat je moest wennen aan 5 inch?
- noobgrinder
- Registratie: Februari 2012
- Laatst online: 24-07 08:37
Prrrr bleep boem!
Ik vlieg voornamelijk met m'n ZMR180 met 4inch proppelers.
Synthpop muziek: https://soundcloud.com/boppeaux
- SG
- Registratie: Januari 2001
- Laatst online: 29-07 11:50
Bullit pins ja bij mijn eerste zelf bouw Flip260 heb die wel gebruikt.
2mm zijn best wel lang dus je moet er de ruimte voor hebben.
En Mixuko is de ruimte er niet.
Bij de hardcore race piloten is bullit pins een no go?
Maar vind toch wel handig. Na zand happen kon ik ze redelijk motoren van de drone demonteren zonder soldeer zooi. Maar omdat ik er niet goed aan kon komen door dubbeldeck frame design ene ESC verbinding gesloopt.
Ik heb nu wat compactere MT30 stekkers voor volgende build. En hebben trek ontlasting lip aan de stekker als 3 pins stekker.
Heb ooit harde crash gemaakt wat de OSD FC verbinding omzeep geholpen heeft van dure OSDoge. Doet het nog maar zonder FC feedback.
Heb ook F4 liggen. Maar mij lijken BF en RF niet de geavanceerde features te ondersteunen . Het zijn Race software beheer apps.
F4 heeft opties om ook autonoom en GPS en sensor zooi te doen wat allemaal wat reken kracht vereist zo ook gyro en magneto en baro meter.
Allemaal dingen die pure race piloten liever niet willen. En daarom zijn er ook kale F4 FC .
F4 revo is full featured. Dan heb liever software die ook robuste ground controle features bied en firmware voor FC die dat ook benut.
Voor Revo F4 is dat LibrePilot.
Laast gechecked Betaflight ondersteund ook de Revo maar ja als race platform.
Met de winter in zicht ook aan orienteren naar inductrix iets met FPV feature voor indoor FPV op veilige slomo manier.
Inductrix whoop whoop mod heb ik geen zin in.
De Inductrix FPV presteerd iets minder dan de modded versie.
2mm zijn best wel lang dus je moet er de ruimte voor hebben.
En Mixuko is de ruimte er niet.
Bij de hardcore race piloten is bullit pins een no go?
Maar vind toch wel handig. Na zand happen kon ik ze redelijk motoren van de drone demonteren zonder soldeer zooi. Maar omdat ik er niet goed aan kon komen door dubbeldeck frame design ene ESC verbinding gesloopt.
Ik heb nu wat compactere MT30 stekkers voor volgende build. En hebben trek ontlasting lip aan de stekker als 3 pins stekker.
Heb ooit harde crash gemaakt wat de OSD FC verbinding omzeep geholpen heeft van dure OSDoge. Doet het nog maar zonder FC feedback.
Heb ook F4 liggen. Maar mij lijken BF en RF niet de geavanceerde features te ondersteunen . Het zijn Race software beheer apps.
F4 heeft opties om ook autonoom en GPS en sensor zooi te doen wat allemaal wat reken kracht vereist zo ook gyro en magneto en baro meter.
Allemaal dingen die pure race piloten liever niet willen. En daarom zijn er ook kale F4 FC .
F4 revo is full featured. Dan heb liever software die ook robuste ground controle features bied en firmware voor FC die dat ook benut.
Voor Revo F4 is dat LibrePilot.
Laast gechecked Betaflight ondersteund ook de Revo maar ja als race platform.
Met de winter in zicht ook aan orienteren naar inductrix iets met FPV feature voor indoor FPV op veilige slomo manier.
Inductrix whoop whoop mod heb ik geen zin in.
De Inductrix FPV presteerd iets minder dan de modded versie.
X399 Taichi; ThreadRipper 1950X; 32GB; VEGA 56; BenQ 32" 1440P | Gigbyte; Phenom X4 965; 8GB; Samsung 120hz 3D 27" | W2012SER2; i5 quadcore | Mac mini 2014 | ATV 4g | ATV 4K
- Tijgert
- Registratie: December 2001
- Laatst online: 02-08 06:05
Let the Zen flow. Shit a leak!
:strip_icc():strip_exif()/u/42999/kamikaze.jpg?f=community)
Leute, sorry dat ik de thread een klein beetje onderbreek/hijack.
Ik lees hier graag mee en steek dingen op, maar ben nog lang niet toe aan zelf bouw.
Mijn eerste aankoop was een sof, gammel 2e hands ding, mijn fout.
Nu wil ik wat nieuws en goeds kopen waar ik wat aan heb, mee kan oefenen en spelen en uiteindelijk wat aan kan modden en mijn oog is gevallen op een Hubsan 501S. (de Pro, niet de vanilla)

Kunnen jullie mij een beetje advies geven over de wijsheid van deze beslissing?
Mijn vraag is, los van mijn doel of ervaring,: is dit een bekend merk/model en/of zijn er mensen die een goede reden hebben waarom ik dit vooral niet/wel moet aanschaffen?
Als er betere alternatieven/ideeen zijn hoor ik dat graag.
Appreciate it
Ik lees hier graag mee en steek dingen op, maar ben nog lang niet toe aan zelf bouw.
Mijn eerste aankoop was een sof, gammel 2e hands ding, mijn fout.
Nu wil ik wat nieuws en goeds kopen waar ik wat aan heb, mee kan oefenen en spelen en uiteindelijk wat aan kan modden en mijn oog is gevallen op een Hubsan 501S. (de Pro, niet de vanilla)
Kunnen jullie mij een beetje advies geven over de wijsheid van deze beslissing?
Mijn vraag is, los van mijn doel of ervaring,: is dit een bekend merk/model en/of zijn er mensen die een goede reden hebben waarom ik dit vooral niet/wel moet aanschaffen?
Als er betere alternatieven/ideeen zijn hoor ik dat graag.
Appreciate it
Lenovo Legion 9i 18IAX10 5090 en een 9800X3D met Astral 5090 OC voor als het toch beter moet.
- Kars
- Registratie: November 2010
- Laatst online: 11:31
WelkomTijgert schreef op dinsdag 18 oktober 2016 @ 00:13:
Leute, sorry dat ik de thread een klein beetje onderbreek/hijack.
Ik lees hier graag mee en steek dingen op, maar ben nog lang niet toe aan zelf bouw.
Mijn eerste aankoop was een sof, gammel 2e hands ding, mijn fout.
Nu wil ik wat nieuws en goeds kopen waar ik wat aan heb, mee kan oefenen en spelen en uiteindelijk wat aan kan modden en mijn oog is gevallen op een Hubsan 501S. (de Pro, niet de vanilla)
[afbeelding]
Kunnen jullie mij een beetje advies geven over de wijsheid van deze beslissing?
Mijn vraag is, los van mijn doel of ervaring,: is dit een bekend merk/model en/of zijn er mensen die een goede reden hebben waarom ik dit vooral niet/wel moet aanschaffen?
Als er betere alternatieven/ideeen zijn hoor ik dat graag.
Appreciate it
In het kort: ja, prima ding, zie de diverse reviews op RCgroups en op YouTube.
Deze Hubsan is wel een model met een verhaal...
Toen 'de gekte' rondom drones toenam, was iedereen onder de indruk van de Hubsan X4 mini drone. Deze was heel makkelijk te vliegen en de perfecte beginnersdrone.
Omdat Hubsan het succes ook wist, besloten ze een brushless drone te maken. De 501S.
Dit moest hét brushless model worden voor zowel beginners als gevorderden.
Deze werd eigenlijk veel te vroeg aangekondigd, want ze zaten nog in de ontwikkelingsfase. Mensen die de 501 hadden gepre-ordered, moesten dan ook gruwelijk lang wachten.
Uiteindelijk waren ze dan ook erg laat met uitleveren, waardoor de meesten al een andere drone hadden gekozen die voordeliger was en bijna dezelfde functies had.
Daarbij kwam het 'probleem' dat Hubsan een hoogte-restrictie had ingebouwd van 120 meter (dit is later met een softwareupdate verholpen).
Uiteindelijk is de prijs behoorlijk gezakt door toenemende concurrentie.
Dus voor de prijs die nu bij Banggood staat, heb je naar mijn idee een goede koop
-edit-
Mocht je interesse hebben in een volledig ready-to-fly FPV carbon racemodel, dan weet ik nog wel iemand.
1-7-4-10-2-8-6-12-3-9-5-11
/u/406593/crop5eb27bb46c138.png?f=community)
Volg dit topic al geruime tijd en ben ook beginnend Quad piloot.Tijgert schreef op dinsdag 18 oktober 2016 @ 00:13:
Leute, sorry dat ik de thread een klein beetje onderbreek/hijack.
Ik lees hier graag mee en steek dingen op, maar ben nog lang niet toe aan zelf bouw.
Mijn eerste aankoop was een sof, gammel 2e hands ding, mijn fout.
Nu wil ik wat nieuws en goeds kopen waar ik wat aan heb, mee kan oefenen en spelen en uiteindelijk wat aan kan modden en mijn oog is gevallen op een Hubsan 501S. (de Pro, niet de vanilla)
[afbeelding]
Kunnen jullie mij een beetje advies geven over de wijsheid van deze beslissing?
Mijn vraag is, los van mijn doel of ervaring,: is dit een bekend merk/model en/of zijn er mensen die een goede reden hebben waarom ik dit vooral niet/wel moet aanschaffen?
Als er betere alternatieven/ideeen zijn hoor ik dat graag.
Appreciate it
Heb die H501S ook al een tijdje in het vizier gehad. Voor een piloot die echt net begint met vliegen is dat IMHO wat teveel hooi op de vork. Neem eerst een goedkope (micro) Quad. Vergeet ook niet te kijken of de onderdelen goedkoop zijn van het model die je wilt kopen. Eentje met Headless en Altitude hold voor de echte starters (deze functies moeten wel uitschakelbaar zijn).
Voordat je het weet heb je meerdere quads 'gehad' en heb je voor elk model een TX liggen.
Dan ga je je verdiepen in een universele TX waar meerdere modellen in geprogrammeerd kunnen worden, en eigenlijk zou je daar mee moeten beginnen.
Vervolgens begin je voorzichtig met zelfbouw (deze fase zit ik), eerst met brushed motors, maar strax ook brushless
Hier nu parts onderweg vanaf banggood. Totaly hooked
EDIT: E-Bay, Bang Good etc...? kans bestaat dat je door de douane eruit gepikt wordt, BTW en invoerechten etc.Heb ik 1x gehad met een Hubsan H107 modelletje, maar zelfs met die toeslagen was dat goedkoper dan waar ook in Nederland.
[ Voor 5% gewijzigd door BazerK op 18-10-2016 13:47 ]
Slechts de onwetende wordt kwaad, de wetende verstaat.
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
:strip_exif()/u/490207/Einstein.gif?f=community)
Hmm ik ben lekker op vakantie in Duitsland (met gezin en ZMR). Nu zie ik de Dom v3 20 euro goedkoper bij HK!
Zo wordt het wel erg aantrekkelijk...
Is er welicht een v4 op komst?
Zo wordt het wel erg aantrekkelijk
Is er welicht een v4 op komst?
Ik heb gisterenavond m'n nieuwe Naze32 rev6 10DOF voorzien van pinheaders en in m'n quad gezet. Tevens heb ik ook direct het Matek PDB eruit gehaald, en VBAT aangesloten op de nieuwe FC. So far so good !
Nu loop ik (weer) tegen het volgende aan, maar dit gebeurd bij zowel Cleanflight als Betaflight. Wat wel een verschil is: de 10DOF versie powered via USB ook mijn rtx en de ESC's, terwijl de 6DOF dat niet doet.
In onderstaand filmpje heb ik de USB kabel net aangesloten (dus nog geen lipo).
YouTube: Naze 32 - SimonK Afro ESC
Airmode staat uit. Heeft iemand enig idee wat dit kan zijn ? Dit is dus exact hetzelfde probleem als dat ik eerder ook al had.
Zodra ik een LiPo aansluit dan gaan de motoren direct hard draaien (volgens mij geen full throttle).
Het is misschien een onsamenhangend verhaal, maar ik ben echt kwijt in welke richting ik dit moet zoeken.
Edit: Dit lijkt wel exact mijn probleem.
Nu loop ik (weer) tegen het volgende aan, maar dit gebeurd bij zowel Cleanflight als Betaflight. Wat wel een verschil is: de 10DOF versie powered via USB ook mijn rtx en de ESC's, terwijl de 6DOF dat niet doet.
In onderstaand filmpje heb ik de USB kabel net aangesloten (dus nog geen lipo).
YouTube: Naze 32 - SimonK Afro ESC
Airmode staat uit. Heeft iemand enig idee wat dit kan zijn ? Dit is dus exact hetzelfde probleem als dat ik eerder ook al had.
Zodra ik een LiPo aansluit dan gaan de motoren direct hard draaien (volgens mij geen full throttle).
Het is misschien een onsamenhangend verhaal, maar ik ben echt kwijt in welke richting ik dit moet zoeken.
Edit: Dit lijkt wel exact mijn probleem.
[ Voor 6% gewijzigd door Jodel op 19-10-2016 08:56 ]
- FastFred
- Registratie: Maart 2009
- Laatst online: 13:16
/u/296398/crop618d33cd3b82c_cropped.png?f=community)
Ik wil het drone vliegen eens proberen en ben aan het rond kijken naar een goedkope drone om eerst eens te leren vliegen met zo'n ding. Kijk je bijvoorbeeld naar kleine Parrot's van rond de € 100 / € 150 dan bestuur je die vaak met een app via je telefoon. Als ik later wil door groeien naar een zelfbouw drone met een reguliere afstandsbediening lijkt me dat niet de beste manier om de controlls onder de knie te krijgen?
Zijn er ook betaalbare drones die met een afstandsbediening komen, die ik later mee kan nemen naar een zelfbouw drone?
Zijn er ook betaalbare drones die met een afstandsbediening komen, die ik later mee kan nemen naar een zelfbouw drone?
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Nee geen v4 (denk ik), maar er komt wel een HD3, maar die zal wel aan de prijs zijn denk ik. Haal nou maar die v3Sumerechny schreef op dinsdag 18 oktober 2016 @ 14:37:
Hmm ik ben lekker op vakantie in Duitsland (met gezin en ZMR). Nu zie ik de Dom v3 20 euro goedkoper bij HK!
Zo wordt het wel erg aantrekkelijk
Is er welicht een v4 op komst?
- Kars
- Registratie: November 2010
- Laatst online: 11:31
Ja, die zijn er, zoals deze Eachine EB185.FastFred schreef op woensdag 19 oktober 2016 @ 09:32:
Ik wil het drone vliegen eens proberen en ben aan het rond kijken naar een goedkope drone om eerst eens te leren vliegen met zo'n ding. Kijk je bijvoorbeeld naar kleine Parrot's van rond de € 100 / € 150 dan bestuur je die vaak met een app via je telefoon. Als ik later wil door groeien naar een zelfbouw drone met een reguliere afstandsbediening lijkt me dat niet de beste manier om de controlls onder de knie te krijgen?
Zijn er ook betaalbare drones die met een afstandsbediening komen, die ik later mee kan nemen naar een zelfbouw drone?
Het is een racedrone, maar op dit moment (nog 4 dagen) zeer voordelig en dan heb je een afstandsbediening die je later weer kunt gebruiken
Jep, de Naze32 rev6 spuugt via USB ook 5V uit die de ESC van power voorziet.Jodel schreef op woensdag 19 oktober 2016 @ 08:37:
Ik heb gisterenavond m'n nieuwe Naze32 rev6 10DOF voorzien van pinheaders en in m'n quad gezet. Tevens heb ik ook direct het Matek PDB eruit gehaald, en VBAT aangesloten op de nieuwe FC. So far so good !
Nu loop ik (weer) tegen het volgende aan, maar dit gebeurd bij zowel Cleanflight als Betaflight. Wat wel een verschil is: de 10DOF versie powered via USB ook mijn rtx en de ESC's, terwijl de 6DOF dat niet doet.
In onderstaand filmpje heb ik de USB kabel net aangesloten (dus nog geen lipo).
YouTube: Naze 32 - SimonK Afro ESC
Airmode staat uit. Heeft iemand enig idee wat dit kan zijn ? Dit is dus exact hetzelfde probleem als dat ik eerder ook al had.
Zodra ik een LiPo aansluit dan gaan de motoren direct hard draaien (volgens mij geen full throttle).
Het is misschien een onsamenhangend verhaal, maar ik ben echt kwijt in welke richting ik dit moet zoeken.
Edit: Dit lijkt wel exact mijn probleem.
Zelf heb ik alleen de ESC signal-cable (geel) aangesloten op mijn FC. Daardoor loopt er geen 5V naar mijn ESC.
De BEC van mijn Matek geeft 5V door aan de FC. Dus pas als ik een LiPo aansluit, gaat de ESC aan.
Misschien kun je er wat mee
[ Voor 25% gewijzigd door Kars op 19-10-2016 09:59 ]
1-7-4-10-2-8-6-12-3-9-5-11
Ah, dat verklaard inderdaad. Ik denk dat ik dan toch maar weer de Matek in moet bouwen, en van daaruit de FC voorzien van stroom.Kars schreef op woensdag 19 oktober 2016 @ 09:55:
Jep, de Naze32 rev6 spuugt via USB ook 5V uit die de ESC van power voorziet.
Zelf heb ik alleen de ESC signal-cable (geel) aangesloten op mijn FC. Daardoor loopt er geen 5V naar mijn ESC.
De BEC van mijn Matek geeft 5V door aan de FC. Dus pas als ik een LiPo aansluit, gaat de ESC aan.
Misschien kun je er wat mee
Dan heb ik ook direct low voltage alarm, en kan ik via de fix van Radiance m'n lost plane finder laten werken.
[ Voor 7% gewijzigd door Jodel op 19-10-2016 12:34 ]
- kevin303
- Registratie: April 2008
- Laatst online: 04-02 21:33
Deze winter wil ik een racer in elkaar bouwen.Had gedacht aan deze basis onderdelen. Iemand nog advies ?
Oeps zie juist pas dat de 2205 motoren er niet op gaan passen. Andere frame of motors


Oeps zie juist pas dat de 2205 motoren er niet op gaan passen. Andere frame of motors
[ Voor 17% gewijzigd door kevin303 op 19-10-2016 17:18 ]
- DCFreak
- Registratie: Oktober 2006
- Laatst online: 31-12-2022
If it aint broke, dont fix it.
Als je nog te horen krijgt wat de oorzaak was, zou je dat dan hier willen delen?itcouldbeanyone schreef op zondag 16 oktober 2016 @ 21:36:
Video van de crash
oorzaak nog onbekend, ga het nu laten repareren door garantie
[video]
- Kars
- Registratie: November 2010
- Laatst online: 11:31
Mwah, ik zou persoonlijk niet voor dat frame kiezen, is gedateerd.kevin303 schreef op woensdag 19 oktober 2016 @ 17:07:
Deze winter wil ik een racer in elkaar bouwen.Had gedacht aan deze basis onderdelen. Iemand nog advies ?
Oeps zie juist pas dat de 2205 motoren er niet op gaan passen. Andere frame of motors
[afbeelding]
[afbeelding]
Een 4'' of 5'' is nu de trend
Dan liever deze of deze
1-7-4-10-2-8-6-12-3-9-5-11
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
Uiteraadt, ga hem morgen afgeven voor garantie,DCFreak schreef op woensdag 19 oktober 2016 @ 21:16:
[...]
Als je nog te horen krijgt wat de oorzaak was, zou je dat dan hier willen delen?
best raar want heb al 13 uur er mee gevlogen zonder enige problemen
das 287KM
Ben niet slim, maar wel dom
- kevin303
- Registratie: April 2008
- Laatst online: 04-02 21:33
Thx. Die eerste frame is precies een clone van de Impulse RC alien en 90 euro goedkoperKars schreef op woensdag 19 oktober 2016 @ 21:36:
[...]
Mwah, ik zou persoonlijk niet voor dat frame kiezen, is gedateerd.
Een 4'' of 5'' is nu de trend
Dan liever deze of deze
- DCFreak
- Registratie: Oktober 2006
- Laatst online: 31-12-2022
If it aint broke, dont fix it.
Was er geen enkele foutmelding in de app (tijdens de vlucht) of achteraf in het flightlog te vinden?itcouldbeanyone schreef op woensdag 19 oktober 2016 @ 21:53:
[...]
Uiteraadt, ga hem morgen afgeven voor garantie,
best raar want heb al 13 uur er mee gevlogen zonder enige problemen
das 287KM
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Er is een opvolger van dat 210 x frame.Kars schreef op woensdag 19 oktober 2016 @ 21:36:
[...]
Mwah, ik zou persoonlijk niet voor dat frame kiezen, is gedateerd.
Een 4'' of 5'' is nu de trend
Dan liever deze of deze
klik.
Ik weet niet hoe jou soldeer skills zijn maar als ik uit eigen ervaring spreek dan had ik de eerste keer never nooit alles op dat x frame gekregen. Ik heb zelf wel de ZMR250 die je zelf aan gaf.kevin303 schreef op woensdag 19 oktober 2016 @ 17:07:
Deze winter wil ik een racer in elkaar bouwen.Had gedacht aan deze basis onderdelen. Iemand nog advies ?
Oeps zie juist pas dat de 2205 motoren er niet op gaan passen. Andere frame of motors
[afbeelding]
[afbeelding]
Ik had totaal geen ervaring met solderen op wat spelen met een soldeerpistool als kind na.
Ik zou dan eerder voor het frame gaat was Kars als eerste linkt, dan heb je net wat meer ruimte.
Als je toch besluit om voor dat kleine x frame te gaan kan je ook naar deze pakketten kijken:
Realacc x210, Racerstar BR2205 2300kv, Racerstar RS20A ESC, SP F3 FC
Realacc x210, Racerstar BR2205 2300kv, Racerstar RS30A ESC, SP F3 FC
Realacc x210, Racerstar BR2205 2600kv, Racerstar RS30A ESC, SP F3 FC
Dan ben je op een receiver na in principe klaar om de lucht in te gaan met naar mijns inzien een behoorlijk goede build. Deze pakketten hebben trouwens wel nog dat oude X frame, niet die nieuwe die ik bovenaan link.
- SG
- Registratie: Januari 2001
- Laatst online: 29-07 11:50
Wat mij opvald na zien van YT.itcouldbeanyone schreef op zondag 16 oktober 2016 @ 23:14:
[...]
de eerste keer dat het gebeurde dacht ik dat het een windvlaag was, is vaker gebeurt dan zie je ook even kort je propellor.
op het moment dat ik daar stond werd het probleem pas duidelijk waneer hij echt ver naar voren neigde.
ik heb daarna ook meteen veel hoogte proberen te verliezen, om de impact van een crash te verlichten.
als ik daar plaatselijk was gaan landen was de schade veel groter geweest dan dat dat nu is.
de drone heeft geen zichtbare schade, en vliegt nog steeds, maar het probleem van het filmpje doet zich nog voor, hij reageert erg instabiel, shockerig waneer ik hem laat hoveren op 2 a 5 meter hoogte.
Hier is mijn flight log
http://healthydrones.com/main?share=KuownR
800 meter is niet meer line of sight vliegen.
Boven wegen vliegen is ook niet de bedoeling. Zag daar onder auto rijden.
Tja geen wonder dat je hem daar niet laat landen.
Ik hou mij redelijk aan de regeles dus mijn GPS drone crash veilig in het veldje waar ik vlieg op loop afstand in grass. Door prop die uitelkaar scheurd.
Ik vlieg ook niet over mede piloten en onze auto's.
En met speed van 76 km/u hou ik ook ingecalculeerde crash afstand.
Met 100++ km / u racer nog wel meer. 50 meter is niks.
En ja niet iedereen houd eraan.
Maar ten alle tijde moet je veilig kunnen landen.
En FPV heb je toch echt wel spotter nodig. Gezien wij racer op zoek zijn plekken waar niemand komt. Maar blijkbaar doen honden bezitters dat ook , die rijden ook naar plekken waar bijna niemand komt en dan kom je vaak wandelaars met honden tegen. Spotter is dus must voor ons racers.
Met GCS kan nog zelf in de gaten houden.
Tja en dan heb je een drone die km ver kan vliegen. Wat volgens de RC regelgeving al niet mag. Laat staan dat het met maar 25mW uitzend.
Daarnaast zichbare schade is het makkelijkst.
Maar je zou ook de motor lager kunnen controleren of ze allemaal even soepel draaien. Het is niet zo dat lagers evenredig slijten. Ook of motor as niet krom is en props in balans zijn.
Gare motor en dan vliegt het ook niet stabiel meer.
Cobra 2400Kv gaar te veel stof.
Xnova motor gaar na crash ook troep erin.
Draaien niet lekker rond.
Tja lagers hebben ook aantal vlieg uren limiet
Bij Cobra en T- motors ook bestelbaar en leverbaar.
De quadcopter prop geluid klinkt vaak ook heel anders dan in zijn goede tijden.
X399 Taichi; ThreadRipper 1950X; 32GB; VEGA 56; BenQ 32" 1440P | Gigbyte; Phenom X4 965; 8GB; Samsung 120hz 3D 27" | W2012SER2; i5 quadcore | Mac mini 2014 | ATV 4g | ATV 4K
Ik heb gisteren de build weer omgegooid, dus de Matek er weer in, FC power via Matek en proberen de lost plane finder aan het werken te krijgen.
Uiteindelijk is dit allemaal gelukt.
In Betaflight heb ik Servo tilt aangezet. Dit zorgt er voor dat alle motor aansluitingen 2 servo's worden verplaatst. Motor 1 sluit je aan op servo 3, 2 op 4, 3 op 5, en 5 op 6. Dit alles werkt.
Het Matek bordje heb ik aangesloten op servo 1 (en dus power voor de FC), en in het tabblad servo's van Betaflight heb ik Aux 5 (de draaiknop op de Frsky i6) hieraan gekoppeld. Dit alles werkt!
Ik heb ook direct de 5v aansluitingen van de ESC's naar de FC weg gehaald, zodat de FC alleen nog maar voeding krijgt van de Matek.
Daarna ben ik weer op zoek gegaan naar een oplossing voor de problemen met Betaflight. En met succes ! Het lijkt er op dat mijn ESC's (SimonK Afro) geen oneshot ondersteunen, maar alleen PWM Ik heb gelezen dat dit met een nieuwere versie van BLHeli wel zou moeten werken, maar dit heb ik nog niet kunnen testen.
Uiteindelijk is dit allemaal gelukt.
In Betaflight heb ik Servo tilt aangezet. Dit zorgt er voor dat alle motor aansluitingen 2 servo's worden verplaatst. Motor 1 sluit je aan op servo 3, 2 op 4, 3 op 5, en 5 op 6. Dit alles werkt.
Het Matek bordje heb ik aangesloten op servo 1 (en dus power voor de FC), en in het tabblad servo's van Betaflight heb ik Aux 5 (de draaiknop op de Frsky i6) hieraan gekoppeld. Dit alles werkt!
Ik heb ook direct de 5v aansluitingen van de ESC's naar de FC weg gehaald, zodat de FC alleen nog maar voeding krijgt van de Matek.
Daarna ben ik weer op zoek gegaan naar een oplossing voor de problemen met Betaflight. En met succes ! Het lijkt er op dat mijn ESC's (SimonK Afro) geen oneshot ondersteunen, maar alleen PWM
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Draai jij een oudere versie van Betaflight want bij mij zat die servo tilt op ESC 6. De motoren bleven gewoon op 1 tm 4. Of draai jij nu 3.0.1 en hebben ze het weer veranderd?Jodel schreef op donderdag 20 oktober 2016 @ 09:06:
Ik heb gisteren de build weer omgegooid, dus de Matek er weer in, FC power via Matek en proberen de lost plane finder aan het werken te krijgen.
Uiteindelijk is dit allemaal gelukt.
In Betaflight heb ik Servo tilt aangezet. Dit zorgt er voor dat alle motor aansluitingen 2 servo's worden verplaatst. Motor 1 sluit je aan op servo 3, 2 op 4, 3 op 5, en 5 op 6. Dit alles werkt.
Het Matek bordje heb ik aangesloten op servo 1 (en dus power voor de FC), en in het tabblad servo's van Betaflight heb ik Aux 5 (de draaiknop op de Frsky i6) hieraan gekoppeld. Dit alles werkt!
Ik heb ook direct de 5v aansluitingen van de ESC's naar de FC weg gehaald, zodat de FC alleen nog maar voeding krijgt van de Matek.
Daarna ben ik weer op zoek gegaan naar een oplossing voor de problemen met Betaflight. En met succes ! Het lijkt er op dat mijn ESC's (SimonK Afro) geen oneshot ondersteunen, maar alleen PWM
Ik draai 3.0.1, maar wel met een Naze32 rev6. Misschien dat daar het verschil in zit.Radiance schreef op donderdag 20 oktober 2016 @ 09:52:
[...]
Draai jij een oudere versie van Betaflight want bij mij zat die servo tilt op ESC 6. De motoren bleven gewoon op 1 tm 4. Of draai jij nu 3.0.1 en hebben ze het weer veranderd?
- Kars
- Registratie: November 2010
- Laatst online: 11:31
Pff, omdat het buiten zo'n boutweer is, even een filmpje van een aantal weken oud
1-7-4-10-2-8-6-12-3-9-5-11
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Ik ben helemaal niet van het tunen, maar in deze video zie je rond 01:33 heel mooi dat je (roll) I te hoog staat. Verder leuke video, ik wil de zomer terugKars schreef op donderdag 20 oktober 2016 @ 11:34:
Pff, omdat het buiten zo'n boutweer is, even een filmpje van een aantal weken oud
- Kars
- Registratie: November 2010
- Laatst online: 11:31
Klopt inderdaadSensei_D schreef op donderdag 20 oktober 2016 @ 12:21:
[...]
Ik ben helemaal niet van het tunen, maar in deze video zie je rond 01:33 heel mooi dat je (roll) I te hoog staat. Verder leuke video, ik wil de zomer terug
Heb het inmiddels aangepast, want ook mijn pitch I stond te hoog. Nu is het allemaal een stukje stabieler
1-7-4-10-2-8-6-12-3-9-5-11
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
nee helemaal niets. geen melding, en niks in de flight log, alleen dat hij iets meer stroom vrat op het moment dat het mis gingDCFreak schreef op woensdag 19 oktober 2016 @ 23:52:
[...]
Was er geen enkele foutmelding in de app (tijdens de vlucht) of achteraf in het flightlog te vinden?
Ben niet slim, maar wel dom
- B_sHoRtY
- Registratie: September 2010
- Laatst online: 31-07 11:26
Het is inderdaad geweldig boutweer zeg... Heb m'n GoPro maar op m'n quad gebouwd nadat m'n Mobius verloren was gegaan.
De hoeveelheid bijtunen was absurd. M'n quad was keihard aan het oscilleren bij volle thrust.
Mocht het in ons kikkerlandje ooit nog eens droog worden, kan ik eens wat beelden posten
De hoeveelheid bijtunen was absurd. M'n quad was keihard aan het oscilleren bij volle thrust.
Mocht het in ons kikkerlandje ooit nog eens droog worden, kan ik eens wat beelden posten
- itcouldbeanyone
- Registratie: Augustus 2014
- Laatst online: 02-08 13:18
Je hebt zeker weten gelijk , en dat is ook mijn leer momentje geweest. De echte oorzaak hoop ik binnekort boven water te krijgen. De drone is nu opgestuurd voor garantieSG schreef op donderdag 20 oktober 2016 @ 07:54:
[...]
Wat mij opvald na zien van YT.
800 meter is niet meer line of sight vliegen.
Boven wegen vliegen is ook niet de bedoeling. Zag daar onder auto rijden.
Tja geen wonder dat je hem daar niet laat landen.
Ik hou mij redelijk aan de regeles dus mijn GPS drone crash veilig in het veldje waar ik vlieg op loop afstand in grass. Door prop die uitelkaar scheurd.
Ik vlieg ook niet over mede piloten en onze auto's.
En met speed van 76 km/u hou ik ook ingecalculeerde crash afstand.
Met 100++ km / u racer nog wel meer. 50 meter is niks.
En ja niet iedereen houd eraan.
Maar ten alle tijde moet je veilig kunnen landen.
En FPV heb je toch echt wel spotter nodig. Gezien wij racer op zoek zijn plekken waar niemand komt. Maar blijkbaar doen honden bezitters dat ook , die rijden ook naar plekken waar bijna niemand komt en dan kom je vaak wandelaars met honden tegen. Spotter is dus must voor ons racers.
Met GCS kan nog zelf in de gaten houden.
Tja en dan heb je een drone die km ver kan vliegen. Wat volgens de RC regelgeving al niet mag. Laat staan dat het met maar 25mW uitzend.
Daarnaast zichbare schade is het makkelijkst.
Maar je zou ook de motor lager kunnen controleren of ze allemaal even soepel draaien. Het is niet zo dat lagers evenredig slijten. Ook of motor as niet krom is en props in balans zijn.
Gare motor en dan vliegt het ook niet stabiel meer.
Cobra 2400Kv gaar te veel stof.
Xnova motor gaar na crash ook troep erin.
Draaien niet lekker rond.
Tja lagers hebben ook aantal vlieg uren limiet
Bij Cobra en T- motors ook bestelbaar en leverbaar.
De quadcopter prop geluid klinkt vaak ook heel anders dan in zijn goede tijden.
Ben niet slim, maar wel dom
Hm, heel erg vreemd. Ik zou morgen mijn Phantom 3 verkopen en bij het schoonmaken zag ik dit.

Nooit een crash gehad, altijd zuinig met het apparaat geweest. max 20x gevlogen.(max 4 maand oud)
Wat voor vreemde kwaliteit moet dit zijn? Ik heb de winkel waar ik het vandaan heb gehaald maar ge emailed.
Nooit een crash gehad, altijd zuinig met het apparaat geweest. max 20x gevlogen.(max 4 maand oud)
Wat voor vreemde kwaliteit moet dit zijn? Ik heb de winkel waar ik het vandaan heb gehaald maar ge emailed.
- TheRicolaa10
- Registratie: Juni 2012
- Laatst online: 13:52
Is een bekend probleem. Schijnt bij veel Phantom 3's te gebeuren. Valt als het goed is gewoon onder de garantie.rejer schreef op vrijdag 21 oktober 2016 @ 12:20:
Hm, heel erg vreemd. Ik zou morgen mijn Phantom 3 verkopen en bij het schoonmaken zag ik dit.
[afbeelding]
Nooit een crash gehad, altijd zuinig met het apparaat geweest. max 20x gevlogen.(max 4 maand oud)
Wat voor vreemde kwaliteit moet dit zijn? Ik heb de winkel waar ik het vandaan heb gehaald maar ge emailed.
DJI Mavic 3 Classic | i7-8700 - RTX5060Ti - 16GB RAM
Dat mag ik hopen, gezien ik er amper mee gevlogen heb.TheRicolaa10 schreef op vrijdag 21 oktober 2016 @ 12:21:
[...]
Is een bekend probleem. Schijnt bij veel Phantom 3's te gebeuren. Valt als het goed is gewoon onder de garantie.
- DutchWalnut
- Registratie: Februari 2010
- Laatst online: 26-02 16:13
[CMDR Yondu]
:strip_icc():strip_exif()/u/345810/crop55e183f615a34_cropped.jpeg?f=community)
Omdat het overal ook zo zonnig is  , hier een een filmpje van afgelopen zondag.
, hier een een filmpje van afgelopen zondag.
Helaas was mijn BLHeli_s kapot gegaan en moest deze vervangen met nog een 2 paar oude (geen S). Man wat een verschil! Ik wil heel snel weer terug naar BLHeli_s!!
Helaas was mijn BLHeli_s kapot gegaan en moest deze vervangen met nog een 2 paar oude (geen S). Man wat een verschil! Ik wil heel snel weer terug naar BLHeli_s!!
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Heeeey nog een split-S fan
OK, ik doe ook mee... video! (incl. zonnetje)
OK, ik doe ook mee... video! (incl. zonnetje)
[ Voor 6% gewijzigd door Sensei_D op 21-10-2016 13:16 ]
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Ik ben wel klaar met het uitstellen, één deze dagen ga ik de V3 bestellen. Een HD lijkt me ook wel tof, maar die zijn inderdaad nogal prijzig. Er moet helaas ergens een grens getrokken wordenSensei_D schreef op woensdag 19 oktober 2016 @ 09:55:
[...]
Nee geen v4 (denk ik), maar er komt wel een HD3, maar die zal wel aan de prijs zijn denk ik. Haal nou maar die v3
Zijn er FPV'ers die een echte diversity vrx hebben hier? Ik twijfel om daar in te gaan investeren omdat ik toch niet ver vlieg (laat staan mag vliegen). Als ik echter tussen meer bomen ga vliegen kan ik me voorstellen dat er toch een voordeel aan zit.
Hippe filmpjes weer mensen! De afgelopen week heb ik gemerkt hoe anders het vliegen is in het heuvelachtig terrein van de Duitse Eifel. Ik kan goed laag vliegen inmiddels...boven vlakke grond
Edit: De Quanum V2 pro kost met 30-40 euro ook niets meer tegenwoordig.
Edit 2: De bril is onderweg, nu nog een vrx, vtx en diopter setje...ik mag alleen niet meer met de CC betalen van Paypal
Ik heb de basic ImmersionRC 5.8 raceband klaarstaan omdat deze mooi geprijsd is momenteel. Voor de vRx twijfel ik aan de True D diversity reciever...ik val een beetje voor de 'echte' diversity en looks
[ Voor 34% gewijzigd door Sumerechny op 21-10-2016 23:11 ]
- lasharor
- Registratie: December 2004
- Laatst online: 14:59
7 december 2004
Gisteren vrij dus ook maar wat gevlogen. En omdat de trend van filmpjes weer even voorbij komt:
- Sensei_D
- Registratie: Maart 2002
- Laatst online: 29-07 15:39
Nice man! Denk niet dat je er spijt van krijgt. Bedoel je dat je voor een imrc vtx wilt gaan? Neem een Tramp manSumerechny schreef op vrijdag 21 oktober 2016 @ 14:57:
[...]
Edit 2: De bril is onderweg, nu nog een vrx, vtx en diopter setje...ik mag alleen niet meer met de CC betalen van Paypal. Morgen eens weer proberen..mocht iemand ondertussen nog tips hebben;
Ik heb de basic ImmersionRC 5.8 raceband klaarstaan omdat deze mooi geprijsd is momenteel. Voor de vRx twijfel ik aan de True D diversity reciever...ik val een beetje voor de 'echte' diversity en looks(ik ben wat achterdochtig voor de Oosterse clone...) . Of het echt voordeel heeft met mijn vliegafstanden betwijfel ik echter...zeker omdat hij zo'n 70 USD duurder uitkomt dan een standaard vRx van Fatshark/Immersion. Wellicht is die CC block wel even goed, mijn vrouw verklaard me al voor gek
Wat betreft de diversity; ik had dit op de Quanum wel en nu niet. Ja, in parkjes en achter bomen en muren leek de diversity beter, maar het kan ook aan mijn vermogen hebben gelegen (voorheen veel 200mw, nu vaak 25mw) Mijn vliegmaatje heeft die furious d ook en laatst in de garage was zijn bereik slechter dan bij mij. Bij fpv racing komt het imho meer aan op de kwaliteit van je antenne's dan op diversity. Dit door de korte afstanden die je van je af vliegt.
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Ik wil t.z.t. een tweede drone bouwen, wellicht met de 13e maand of m'n verjaardag, tegen die tijd wil ik de Tramp oppakken.Sensei_D schreef op zaterdag 22 oktober 2016 @ 19:36:
[...]
Nice man! Denk niet dat je er spijt van krijgt. Bedoel je dat je voor een imrc vtx wilt gaan? Neem een Tramp man
Wat betreft de diversity; ik had dit op de Quanum wel en nu niet. Ja, in parkjes en achter bomen en muren leek de diversity beter, maar het kan ook aan mijn vermogen hebben gelegen (voorheen veel 200mw, nu vaak 25mw) Mijn vliegmaatje heeft die furious d ook en laatst in de garage was zijn bereik slechter dan bij mij. Bij fpv racing komt het imho meer aan op de kwaliteit van je antenne's dan op diversity. Dit door de korte afstanden die je van je af vliegt.
Inmiddels ben ik ook afgestapt van de dure Diversity modules, over een jaar zal deze techniek een stuk verder en betaalbaarder zijn ga ik vanuit. Zoals je al aangeeft, de afstand waarop ik (we..) vliegen is niet groot, diversity zal hét verschil niet maken.
- Tijgert
- Registratie: December 2001
- Laatst online: 02-08 06:05
Let the Zen flow. Shit a leak!
Yum!lasharor schreef op zaterdag 22 oktober 2016 @ 12:46:
Gisteren vrij dus ook maar wat gevlogen. En omdat de trend van filmpjes weer even voorbij komt:
[video]
1. Welke drone is dit?
2. Versneld afgespeeld of RT?
Lenovo Legion 9i 18IAX10 5090 en een 9800X3D met Astral 5090 OC voor als het toch beter moet.
- lasharor
- Registratie: December 2004
- Laatst online: 14:59
7 december 2004
Mijn MartianTijgert schreef op zaterdag 22 oktober 2016 @ 21:32:
[...]
Yum!
1. Welke drone is dit?
2. Versneld afgespeeld of RT?
- Radiance
- Registratie: April 2005
- Laatst online: 02-08 23:18
Hmm beetje balen... Vandaag m'n motoren binnen gekregen maar heb de verkeerde besteld, heb de 2300kv besteld ipv de 2600kv. Niet heel erg maar wel een beetje jammer.
Wel des te meer reden om door te sparen voor m'n 2e build mét 2600kv.
Van de week als ik tijd heb de boel maar eens op m'n quad zetten en dan zie ik wel hoe ze zijn. Zal niet heel veel beter of slechter zijn dan de DYS die ik nu heb.
Wel des te meer reden om door te sparen voor m'n 2e build mét 2600kv.
Van de week als ik tijd heb de boel maar eens op m'n quad zetten en dan zie ik wel hoe ze zijn. Zal niet heel veel beter of slechter zijn dan de DYS die ik nu heb.
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
DohRadiance schreef op zaterdag 22 oktober 2016 @ 23:23:
Hmm beetje balen... Vandaag m'n motoren binnen gekregen maar heb de verkeerde besteld, heb de 2300kv besteld ipv de 2600kv.
Ik zag deze controllers voorbij komen, dit is een form factor die mij toch meer aanspreekt.
Hoewel ik relatief grote handen heb vind ik de omvang van mijn Turnigy 9x toch behoorlijk. De komst van 'controller sized' tx's vind ik wel een mooie ontwikkeling! (hoewel de TBS nog vrij groot is)
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Het hangt er heel erg vanaf wat je wensen zijn. Waarom wil je zelf bouwen en wat versta je onder goed?Vince23 schreef op zondag 23 oktober 2016 @ 14:00:
Is het mogelijk om een drone te bouwen voor 100€? Of is er een goede drone met camera voor 100€?
Edit: Dit is één die je makkelijk online kan vinden, verwacht er echter niet teveel van
[ Voor 20% gewijzigd door Sumerechny op 23-10-2016 15:41 ]
Ik zou iets meer uitgeven als fpv racen jouw ding is.Vince23 schreef op zondag 23 oktober 2016 @ 14:00:
Is het mogelijk om een drone te bouwen voor 100€? Of is er een goede drone met camera voor 100€?
Dit is een goed begin. Je mist dan nog een camera (35 EUR) en vtx (20 EUR) en een fpv scherm of bril (+- 60 EUR).
http://www.banggood.com/R...1078119.html?rmmds=search
Vorig weekend mijn eigen frame kunnen testen. I love it.
[ Voor 10% gewijzigd door C4D op 23-10-2016 17:49 ]
psn: lupusergo
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Wow...dat ziet er goed uit! Mooi plekje ook, mag ik vragen waar het is?C4D schreef op zondag 23 oktober 2016 @ 17:45:
[...]
Ik zou iets meer uitgeven als fpv racen jouw ding is.
Dit is een goed begin. Je mist dan nog een camera (35 EUR) en vtx (20 EUR) en een fpv scherm of bril (+- 60 EUR).
http://www.banggood.com/R...1078119.html?rmmds=search
Vorig weekend mijn eigen frame kunnen testen. I love it.
[video]
Welke maat heeft je frame en wat heeft het je gekost?
BedanktSumerechny schreef op zondag 23 oktober 2016 @ 19:43:
[...]
Wow...dat ziet er goed uit! Mooi plekje ook, mag ik vragen waar het is?
Welke maat heeft je frame en wat heeft het je gekost?
208 mm (motor tot motor), 45 EUR.
Het is in Hessen (Duitsland). Genoeg ruimte hier.
psn: lupusergo
- soulcrusher
- Registratie: Augustus 2009
- Laatst online: 02-08 22:24
Je mist hierbij ook nog een zender+ontvanger.C4D schreef op zondag 23 oktober 2016 @ 17:45:
[...]
Ik zou iets meer uitgeven als fpv racen jouw ding is.
Dit is een goed begin. Je mist dan nog een camera (35 EUR) en vtx (20 EUR) en een fpv scherm of bril (+- 60 EUR).
http://www.banggood.com/R...1078119.html?rmmds=search
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Haha, ik zat vorige week nog in de Eifel (Gunderath). Geweldige regio!C4D schreef op zondag 23 oktober 2016 @ 20:51:
[...]
Bedankt
208 mm (motor tot motor), 45 EUR.
Het is in Hessen (Duitsland). Genoeg ruimte hier.
Die prijs valt nog mee voor zo'n sexie frame. Draai je 5" props of moet je net 4" hebben?
Ah, yes. Helemaal vergeten.soulcrusher schreef op zondag 23 oktober 2016 @ 21:02:
[...]
Je mist hierbij ook nog een zender+ontvanger.
http://www.banggood.com/F...A6-Receiver-p-922606.html
psn: lupusergo
Het is niet persee om te racen, maar vooral om wat te kennismaken met de wereld van drones. De camera kwaliteit moet ook wel degelijk zijn, ik heb alleen geen enkel idee wat ik kan verwachten ... Dus liever een goede camera dan een hoge snelheid...
Bestaat dit ook voor zelfbouw? Hoe moet ik hier aan beginnen?
Bestaat dit ook voor zelfbouw? Hoe moet ik hier aan beginnen?
Yes, Duitsland heeft wel watSumerechny schreef op zondag 23 oktober 2016 @ 21:03:
[...]
Haha, ik zat vorige week nog in de Eifel (Gunderath). Geweldige regio!
Die prijs valt nog mee voor zo'n sexie frame. Draai je 5" props of moet je net 4" hebben?
5'' (meestal 5x4.5 of 5x4x3).
psn: lupusergo
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Wat wil je met de camera? Voor een 100eu budget kan je wel iets met een camera krijgen maar deze staan vast...met matige kwaliteit.Vince23 schreef op zondag 23 oktober 2016 @ 21:07:
Het is niet persee om te racen, maar vooral om wat te kennismaken met de wereld van drones. De camera kwaliteit moet ook wel degelijk zijn, ik heb alleen geen enkel idee wat ik kan verwachten ... Dus liever een goede camera dan een hoge snelheid...
Bestaat dit ook voor zelfbouw? Hoe moet ik hier aan beginnen?
Als je wil kennismaken moet je niet teveel verwachten, de camera achterwege laten of een groter budget nemen. Zelfbouw wordt ook erg moeilijk met 100eu.
QFASumerechny schreef op zondag 23 oktober 2016 @ 21:14:
[...]
Wat wil je met de camera? Voor een 100eu budget kan je wel iets met een camera krijgen maar deze staan vast...met matige kwaliteit.
Als je wil kennismaken moet je niet teveel verwachten, de camera achterwege laten of een groter budget nemen. Zelfbouw wordt ook erg moeilijk met 100eu.
Voor +- 200 EUR kan je redelijke opnamen maken (Parrot Bebob)
psn: lupusergo
- Pandawan
- Registratie: Mei 2015
- Laatst online: 16-10-2025
:strip_icc():strip_exif()/u/675078/rsz_1pjanda.jpg?f=community)
Kort vraagje, ik heb zo'n antenna besteld: http://img2.banggood.com/...6d9-92ed-abb7558dd0bc.JPG
Heb ik daar ook nog een rx antenna voor nodig van hetzelfde type? of werkt zo'n standaard rx antenna daar ook gewoon in combinatie mee?
Heb ik daar ook nog een rx antenna voor nodig van hetzelfde type? of werkt zo'n standaard rx antenna daar ook gewoon in combinatie mee?
- Sumerechny
- Registratie: December 2012
- Laatst online: 14:35
Daar met je een vergelijkbare antenne of in elk geval een die een gedraaid signaal kan ontvangen (patch kan bijvoorbeeld ook) bij hebben. Let goed op de richting (rechts of links gedraaid).Pandawan schreef op maandag 24 oktober 2016 @ 17:28:
Kort vraagje, ik heb zo'n antenna besteld: http://img2.banggood.com/...6d9-92ed-abb7558dd0bc.JPG
Heb ik daar ook nog een rx antenna voor nodig van hetzelfde type? of werkt zo'n standaard rx antenna daar ook gewoon in combinatie mee?
:strip_icc():strip_exif()/u/443786/crop57a04b34b4f4d_cropped.jpeg?f=community)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Doe jezelf een plezier en koop eerst een kleine drone zonder camera om binnen te oefenen. Het weer wordt nu toch slechter, en crashen doe je sowieso in het begin. Dat doe je liever niet met een dure drone met gimball en HD-cam. Eens je goed line-of-sight rondjes en achten kan vliegen (moet daarom geen acro zijn), kan je beginnen denken aan een groter model, eventueel met FPV. Heb al vaak mensen gezien die een RTF kitje bestellen op Banggood of Hobbyking, en dan na één vlucht hard crashen of de oriëntatie verliezen en hun drone nooit meer terug zien.Vince23 schreef op zondag 23 oktober 2016 @ 21:07:
Het is niet persee om te racen, maar vooral om wat te kennismaken met de wereld van drones. De camera kwaliteit moet ook wel degelijk zijn, ik heb alleen geen enkel idee wat ik kan verwachten ... Dus liever een goede camera dan een hoge snelheid...
Bestaat dit ook voor zelfbouw? Hoe moet ik hier aan beginnen?
RTF zou ik nooit kopen (behalve voor fotografie bv. Phantoms), er gaat sowieso eens iets stuk, en als je het zelf gebouwd hebt, weet je ook hoe je alles moet vervangen. Het bouwen is voor mij al een hobby op zich.
Ik heb zojuist een Eachine Tiny QX95 besteld om een beetje mee te spelen. Uiteraard met wat extra batterijen, en andere props.
- Creesch
- Registratie: Februari 2002
- Laatst online: 12:47
bla bla!
/u/48718/crop619e5ed546e66_cropped.png?f=community)
Iets wat ik me al enige tijd afvraag is waar iedereen diverse onderdelen besteld. Ik zie heel veel gearbest en banggood voorbij komen maar daar zit je vaak met erg lang levertijden.
De enige wat grotere, niet chinese, website die ik zelf ken is dan nog hobbyking maar ik vroeg me af of er nog meer zijn.
Met name levertijden en betrouwbaarheid is waar ik naar op zoek ben. Als ik namelijk google komen er een groot aantal nederlandse webshops voorbij maar bij een zeer groot aantal krijg ik eerder het idee dat ze snel winst proberen te maken omdat quads nu populair zijn en niet echt gaan voor kwaliteit.
De enige wat grotere, niet chinese, website die ik zelf ken is dan nog hobbyking maar ik vroeg me af of er nog meer zijn.
Met name levertijden en betrouwbaarheid is waar ik naar op zoek ben. Als ik namelijk google komen er een groot aantal nederlandse webshops voorbij maar bij een zeer groot aantal krijg ik eerder het idee dat ze snel winst proberen te maken omdat quads nu populair zijn en niet echt gaan voor kwaliteit.
Mijn ervaring is voornamelijk met Banggood. Als je vanuit EU warehouse besteld is het er vaak binnen een week. Vanuit CN doorgaans 2 tot 3 weken.
Bij mij is tot nu toe alles geleverd.
Bij mij is tot nu toe alles geleverd.
Ik bestel hoofdzakelijk bij QuadcoptersEnzo, goeie service en goeie levertijden. Multirotorparts ben ik ook tevreden van. Dingen zoals heatshrink en draden bestel ik altijd op hobbyking EU, en af en toe bestel ik eens iets bij de Rotor Riot store (Alien 5" is onderweg, heel benieuwd om KISS eens te proberen.) Voor KISS hardware en HQ-Props (mijn favoriet) kan je terecht bij Flyduino.net, in Duitsland. Mijn lipo-lader en parralle charge bordjes komen wel van banggood. (EV-Peak CQ3, kan ik echt aanraden, 24 lipo's tegelijk opladen is een luxe)Creesch schreef op dinsdag 25 oktober 2016 @ 13:20:
Iets wat ik me al enige tijd afvraag is waar iedereen diverse onderdelen besteld. Ik zie heel veel gearbest en banggood voorbij komen maar daar zit je vaak met erg lang levertijden.
De enige wat grotere, niet chinese, website die ik zelf ken is dan nog hobbyking maar ik vroeg me af of er nog meer zijn.
Met name levertijden en betrouwbaarheid is waar ik naar op zoek ben. Als ik namelijk google komen er een groot aantal nederlandse webshops voorbij maar bij een zeer groot aantal krijg ik eerder het idee dat ze snel winst proberen te maken omdat quads nu populair zijn en niet echt gaan voor kwaliteit.
Let op:
Het is tijd voor een nieuw deel, met een nieuwe bijgewerkte topicstart. Ben je ervaren met drones en wil je meehelpen? Stuur @_ferry_ een DM.
Voor je filmpjes post, wees je bewust van de regelgeving omtrent het vliegen met drones en besef dat je op eigen risico post. Er wordt actief gekeken naar beeldmateriaal en waar het is opgenomen en wie het gemaakt heeft.
Het is tijd voor een nieuw deel, met een nieuwe bijgewerkte topicstart. Ben je ervaren met drones en wil je meehelpen? Stuur @_ferry_ een DM.
Voor je filmpjes post, wees je bewust van de regelgeving omtrent het vliegen met drones en besef dat je op eigen risico post. Er wordt actief gekeken naar beeldmateriaal en waar het is opgenomen en wie het gemaakt heeft.