In OpenPilot -> LibrePilot CC3D drones. Arm ik met sticks en 2sec idle thotle disarm.
In Cleanflight Arm ik met Linker Binnenste Switch en draaien de motoren meteen
APM & Mission Planner ook met sticks en Disarm na paar secondjes
Cleanflight
1 rechts achter clockwise
2 rechts voren counter clockwise
3 links achter counter clockwise
4 links voren clockwise
Uiteraard de ESC calibreren
FC orientatie instellen
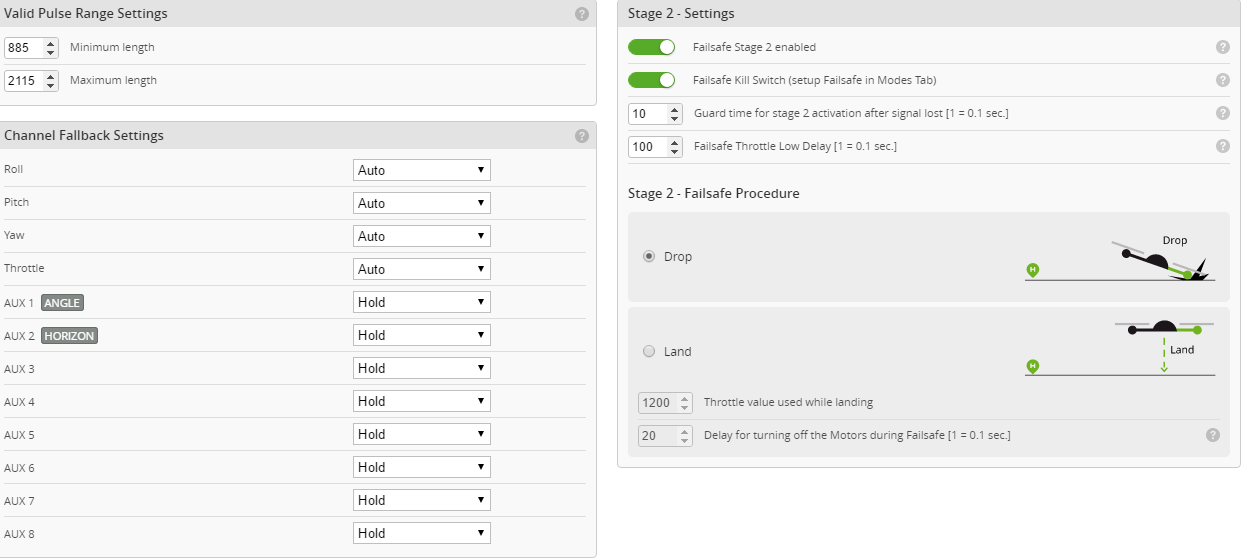
Dan failsave controleren signal los en! Reciever los van FC.
in geval van CW & CCW moeren of prop bevestiging
Ook uiteraard de juiste motor op goede positie.
Dan draairichting controleren
Had ESC met verschilende firm ware dus die ook fkashen.
Ook gehad dat na flashen en kalibreren een motor het wel deed
En ook de engine params insteld samen met draai richting.
Sommige FC zoals Naze32 ondersteunen 1 wire BLheli Passthrough.
Kan je ESC instellen en flashen en draairichting controleren.
En settings ESC vergelijken
[
Voor 61% gewijzigd door
SG op 01-09-2016 06:36
]
X399 Taichi; ThreadRipper 1950X; 32GB; VEGA 56; BenQ 32" 1440P | Gigbyte; Phenom X4 965; 8GB; Samsung 120hz 3D 27" | W2012SER2; i5 quadcore | Mac mini 2014 | ATV 4g | ATV 4K
:fill(white):strip_exif()/i/2003075790.jpeg?f=thumbmini)
/u/446870/crop5db0017462e30.png?f=community)
:strip_icc():strip_exif()/u/143607/naze60.jpg?f=community)
:strip_exif()/u/31994/Orlygot.gif?f=community)
:strip_exif()/u/490207/Einstein.gif?f=community)
:strip_icc():strip_exif()/u/384647/crop6703f16929813_cropped.jpg?f=community)
/u/300076/crop59b52708c822b_cropped.png?f=community)
:strip_icc():strip_exif()/u/345810/crop55e183f615a34_cropped.jpeg?f=community)

/u/33916/crop5d4d5b00c4c16_cropped.png?f=community)

/u/73096/crop651ec71f2cde4_cropped.png?f=community)


:strip_exif()/u/171663/crop620b8dedafa85_cropped.gif?f=community)
:strip_icc():strip_exif()/u/141461/crop5e2b6cc42ec35_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/10361/nylon_beat.jpg?f=community)
 ), haal ik de gesp los, en steek die door m'n frame heen, en dan hangt ie aan m'n rugtas.
), haal ik de gesp los, en steek die door m'n frame heen, en dan hangt ie aan m'n rugtas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}