/u/203831/ts2.PNG?f=community)
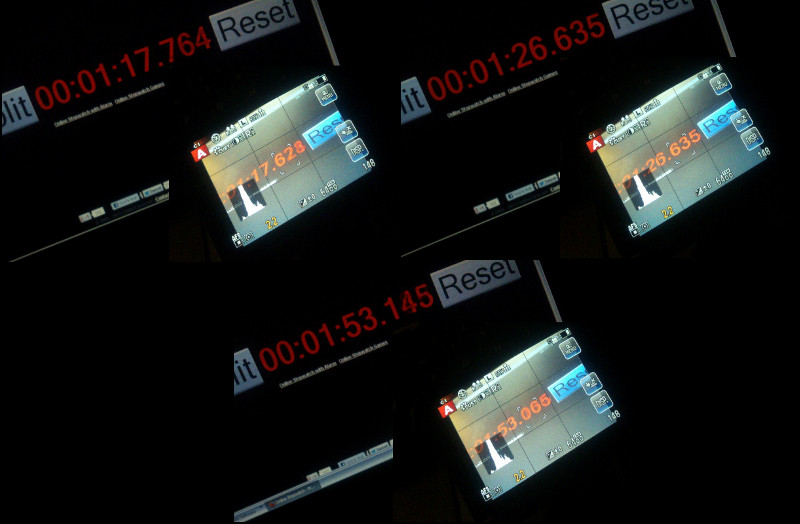
Bij een constante beweging van het onderwerp heb je gelijk, dan is de EVF-vertraging niks anders dan wat extra shutter lag. Maar het probleem is, stel je bijvoorbeeld een langsvliegende vogel voor die je volgt: die beweegt niet op constante hoeksnelheid ten opzichte van jou, maar meer een soort hyperbolische sinus (maw hoeksnelheid is eerst relatief laag, als hij dichtbij is is hij het hoogst, daarna gaat de hoeksnelheid weer omlaag). In dat geval zorgt de EVF-vertraging er wel degelijk voor dat je onderwerp wellicht niet meer in het kader is op het moment dat je afdrukt.
Verder is er momenteel nog geen enkele fabrikant die een EVF heeft die anders werkt dan:
- Foto maken met de sensor
- Beelddata encoderen
- Beelddata naar EVF-module sturen
- Decoderen
- Weergeven
Al deze stappen kosten een eindige hoeveelheid tijd. De eerste stap is per definitie de integratietijd van je sensor, dus bij goed licht kan dat best 1/1000e of minder zijn maar bij slecht licht moet ofwel de versterking (ISO) gigantisch omhoog gegooid worden, ofwel de integratietijd omhoog. De encodeer- en decodeerstadia worden beperkt door de beeldprocessoren die erin zitten, maar iig Sony heeft hier een speciale shortcut voor die dit <1ms maakt. De weergavestap in de EVF is hoe lang een beeld kost om opgebouwd te worden (kortweg responstijd) PLUS gemiddeld 1/2 maal de tijd tussen frames (in het geval van 120fps is dat dus 4,16ms).
Met deze techniek heb je dus altijd, per definitie, bij goed licht een minimale hoeveelheid lag. Theoretisch kun je bij goed licht deze vertraging verminderen tot de orde 10ms, maar in de praktijk zal dit nu nog een stuk hoger liggen.
Er bestaan andere technieken, en er zullen ongetwijfeld binnenkort camera's worden aangekondigd die dit gebruiken (want het wordt al in sommige telefooncamera/compactcamerasensoren gebruikt): partial updates. Het beeld wordt geanalyseerd en er wordt door de camera bepaald of je juist veel detail door je evf wil zien of snelle actie wil vastleggen. Vervolgens wordt de hele keten hierboven doorgelopen, maar de camera neemt veel vaker delen van foto's (ipv hele foto's) in de gebieden waar actie te zien is, zodat de beeldinformatie 'tussentijds' kan worden doorgestuurd ipv dat je op de hele foto moet wachten. Dezelfde trucs worden dan ook met het display uitgevoerd; daar worden niet hele frames geüpdatet, maar alleen de pixels die veranderd zijn.
Zodra die techniek in EVFs wordt gebruikt zijn we van het hele lag-verhaal af.
Verder is er momenteel nog geen enkele fabrikant die een EVF heeft die anders werkt dan:
- Foto maken met de sensor
- Beelddata encoderen
- Beelddata naar EVF-module sturen
- Decoderen
- Weergeven
Al deze stappen kosten een eindige hoeveelheid tijd. De eerste stap is per definitie de integratietijd van je sensor, dus bij goed licht kan dat best 1/1000e of minder zijn maar bij slecht licht moet ofwel de versterking (ISO) gigantisch omhoog gegooid worden, ofwel de integratietijd omhoog. De encodeer- en decodeerstadia worden beperkt door de beeldprocessoren die erin zitten, maar iig Sony heeft hier een speciale shortcut voor die dit <1ms maakt. De weergavestap in de EVF is hoe lang een beeld kost om opgebouwd te worden (kortweg responstijd) PLUS gemiddeld 1/2 maal de tijd tussen frames (in het geval van 120fps is dat dus 4,16ms).
Met deze techniek heb je dus altijd, per definitie, bij goed licht een minimale hoeveelheid lag. Theoretisch kun je bij goed licht deze vertraging verminderen tot de orde 10ms, maar in de praktijk zal dit nu nog een stuk hoger liggen.
Er bestaan andere technieken, en er zullen ongetwijfeld binnenkort camera's worden aangekondigd die dit gebruiken (want het wordt al in sommige telefooncamera/compactcamerasensoren gebruikt): partial updates. Het beeld wordt geanalyseerd en er wordt door de camera bepaald of je juist veel detail door je evf wil zien of snelle actie wil vastleggen. Vervolgens wordt de hele keten hierboven doorgelopen, maar de camera neemt veel vaker delen van foto's (ipv hele foto's) in de gebieden waar actie te zien is, zodat de beeldinformatie 'tussentijds' kan worden doorgestuurd ipv dat je op de hele foto moet wachten. Dezelfde trucs worden dan ook met het display uitgevoerd; daar worden niet hele frames geüpdatet, maar alleen de pixels die veranderd zijn.
Zodra die techniek in EVFs wordt gebruikt zijn we van het hele lag-verhaal af.
:strip_exif()/u/168881/IMG_3752_4.gif?f=community)
:strip_icc():strip_exif()/u/1981/Image00001.jpg?f=community)
:strip_icc():strip_exif()/u/373647/b1aa8209a437bf987cf066823c044f0a.jpeg?f=community)
:strip_exif()/u/49248/DPCkoeienUD.gif?f=community)
:strip_icc():strip_exif()/u/422942/crop5633b835f0cb8_cropped.jpeg?f=community)

:strip_icc():strip_exif()/u/50284/icoon.jpg?f=community)




{kind=link}