/u/211309/crop61b0ff95cd8ef.png?f=community)
C# in de topictitel omdat het in mijn geval om C# gaat, maar dit kan ook het geval zijn voor andere talen.
Ik (en mijn collega's) hebben geregeld het probleem dat we iets moeten visualiseren uit onze code om te kunnen debuggen. Wij hebben geïntegreerde 3D visualisatie in onze applicatie, maar niet voor elk wissewasje willen we een volledig ViewModel optuigen om even snel iets te kunnen visualiseren. Liever zouden gebruiken we een file formaat waarmee we een aantal primitieve vormen in een 3D viewer kunnen laten zien. Dat heeft ook het voordeel dat de applicatie niet hoeft te draaien om te kunnen visualiseren, maar dat we ook gewoon vanaf een breakpoint een export kunnen draaien. Nu gebruiken we daarvoor een bepaalde robot visualisatietool waar we liever niet van afhankelijke zijn (om meerdere niet relevante redenen), maar we zouden graag een open formaat gebruiken met een gratis viewer.
Als we bijvoorbeeld een algoritme hebben dat het collision model van twee machine onderdelen moet controleren op intersectie, en het algoritme geeft een false positive, dan wil je graag de onderdelen waar die collision modellen uit bestaan visualiseren. Dat kunnen lijnen of bollen zijn bijvoorbeeld, of kubussen of andere primitieve vormen. Dit wil je graag midden in je programma kunnen doen, op de plek waar je code dan staat. Dus ideaal gezien zou je zeggen CollisionModel1.Export(@"c:\temp\robot.txt") en dan direct een file op schijf hebben waarin je de geometry hebt die je met een viewer weer opent en de details bekijkt.
Ook bij heel veel 2D algoritmen heb ik hier wel eens behoefte aan, denk aan het opbouwen van een in-memory tree die je wilt visualiseren.
Ik ben erg benieuwd hoe andere programmeurs omgaan met het visualiseren van (debug) data die niet persé voor de eindgebruiker bedoeld is.
Concreet is mijn vraag: is er een bestandsformaat dat makkelijk te lezen en te schrijven is, ondersteuning heeft voor primitieve vormen en een eenvoudige viewer heeft, die bovendien nog liefst gratis is. Wij zijn aan het kijken naar URDF (http://wiki.ros.org/urdf), maar dat is wel heel specifiek om ook bewegende onderdelen weer te geven, en volgens mij qua scope ook vrij beperkt tot ROS. Voordat we daar mee doorgaan wil ik graag zeker weten dat we geen (voor de hand liggend) alternatief missen.
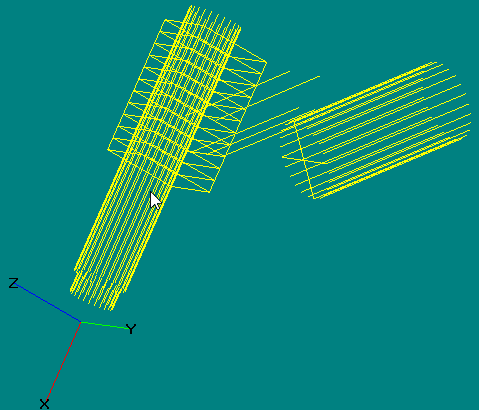
Onderstaand een voorbeeld van een in-memory collision model. Dergelijke visualisaties zou ik graag makkelijk en op elk moment willen kunnen exporteren:
Ik (en mijn collega's) hebben geregeld het probleem dat we iets moeten visualiseren uit onze code om te kunnen debuggen. Wij hebben geïntegreerde 3D visualisatie in onze applicatie, maar niet voor elk wissewasje willen we een volledig ViewModel optuigen om even snel iets te kunnen visualiseren. Liever zouden gebruiken we een file formaat waarmee we een aantal primitieve vormen in een 3D viewer kunnen laten zien. Dat heeft ook het voordeel dat de applicatie niet hoeft te draaien om te kunnen visualiseren, maar dat we ook gewoon vanaf een breakpoint een export kunnen draaien. Nu gebruiken we daarvoor een bepaalde robot visualisatietool waar we liever niet van afhankelijke zijn (om meerdere niet relevante redenen), maar we zouden graag een open formaat gebruiken met een gratis viewer.
Als we bijvoorbeeld een algoritme hebben dat het collision model van twee machine onderdelen moet controleren op intersectie, en het algoritme geeft een false positive, dan wil je graag de onderdelen waar die collision modellen uit bestaan visualiseren. Dat kunnen lijnen of bollen zijn bijvoorbeeld, of kubussen of andere primitieve vormen. Dit wil je graag midden in je programma kunnen doen, op de plek waar je code dan staat. Dus ideaal gezien zou je zeggen CollisionModel1.Export(@"c:\temp\robot.txt") en dan direct een file op schijf hebben waarin je de geometry hebt die je met een viewer weer opent en de details bekijkt.
Ook bij heel veel 2D algoritmen heb ik hier wel eens behoefte aan, denk aan het opbouwen van een in-memory tree die je wilt visualiseren.
Ik ben erg benieuwd hoe andere programmeurs omgaan met het visualiseren van (debug) data die niet persé voor de eindgebruiker bedoeld is.
Concreet is mijn vraag: is er een bestandsformaat dat makkelijk te lezen en te schrijven is, ondersteuning heeft voor primitieve vormen en een eenvoudige viewer heeft, die bovendien nog liefst gratis is. Wij zijn aan het kijken naar URDF (http://wiki.ros.org/urdf), maar dat is wel heel specifiek om ook bewegende onderdelen weer te geven, en volgens mij qua scope ook vrij beperkt tot ROS. Voordat we daar mee doorgaan wil ik graag zeker weten dat we geen (voor de hand liggend) alternatief missen.
Onderstaand een voorbeeld van een in-memory collision model. Dergelijke visualisaties zou ik graag makkelijk en op elk moment willen kunnen exporteren:
:strip_icc():strip_exif()/u/104670/66407.jpg?f=community)
:strip_icc():strip_exif()/u/126096/crop580e4f8566fec_cropped.jpeg?f=community)