:strip_icc():strip_exif()/u/145321/dirkjan.jpg?f=community)
6 assige robotarm
Al ruim een jaar ben ik bezig om mijn eigen 6 assige robotarm te 3d printen. Ik ben er mee begonnen toen ik het werk van Andreas: http://chaozlabs.blogspot.nl/ tegen kwam. Hij heeft al aantal iteraties op het ontwerp gedaan, en heeft een mooie basis ontwikkeld. Helaas is hij al een jaar gestopt met het verder ontwikkelen van zijn robot arm. Ruwweg 65% van mijn arm is identiek aan die van hem.Het originele ontwerp van Andreas

De geprinte versie:

Dit is het ontwerp wat te vinden is op zijn github pagina: https://github.com/4ndreas/BetaBots-Robot-Arm-Project
Zijn hack a day pagina: https://hackaday.io/project/3800-3d-printable-robot-arm
Herontwerp
Op basis van zijn eigen feedback en eigen invulling heb ik vervolgens een herontwerp gemaakt. Met name de pols had een stevig herontwerp nodig om de speling eruit te krijgen. Tevens is het lastiger om de IK (inverse kinematics) te berekenen, omdat het EOA (end of arm) niet in lijn zit met de overige assen.Features:
- Payload zou ongeveer 2 kilogram moeten zijn
- Elke as een absolute encoder, dmv magneten
- Steppers ombouwen naar een "closed loop stepper"
Ik hoop dat ik aan eind van alles een positie nauwkeurigheid haal van +- 1mm..
Buitenkant:

Binnenwerk

Gebruikte stappen motoren:
2x Nema 24
2x Nema 23
1x Nema 17
1x Programmeerbare servo (HerculeX)
Afmetingen zijn vrij fors: In de hoogte is de robotarm zo'n 750mm.
Ik print alles met PLA. De onderdelen komen er zo redelijk recht uit de printer. De printer die hiervoor gebruikt is is een Craftbot Plus. Software die ik gebruik is Simplfiy3D. Met Simplfiy3D kan je vrij goede supports maken, die ook weer goed zijn weg te halen.
Foto's & video's van de productie van de arm



Vooral de onderarm is een leuke, in de behuizing zitten 8 lagers, en moet natuurlijk spelingsvrij worden gemonteerd.
Recentelijk de laatste as mechanisch in orde gemaakt:
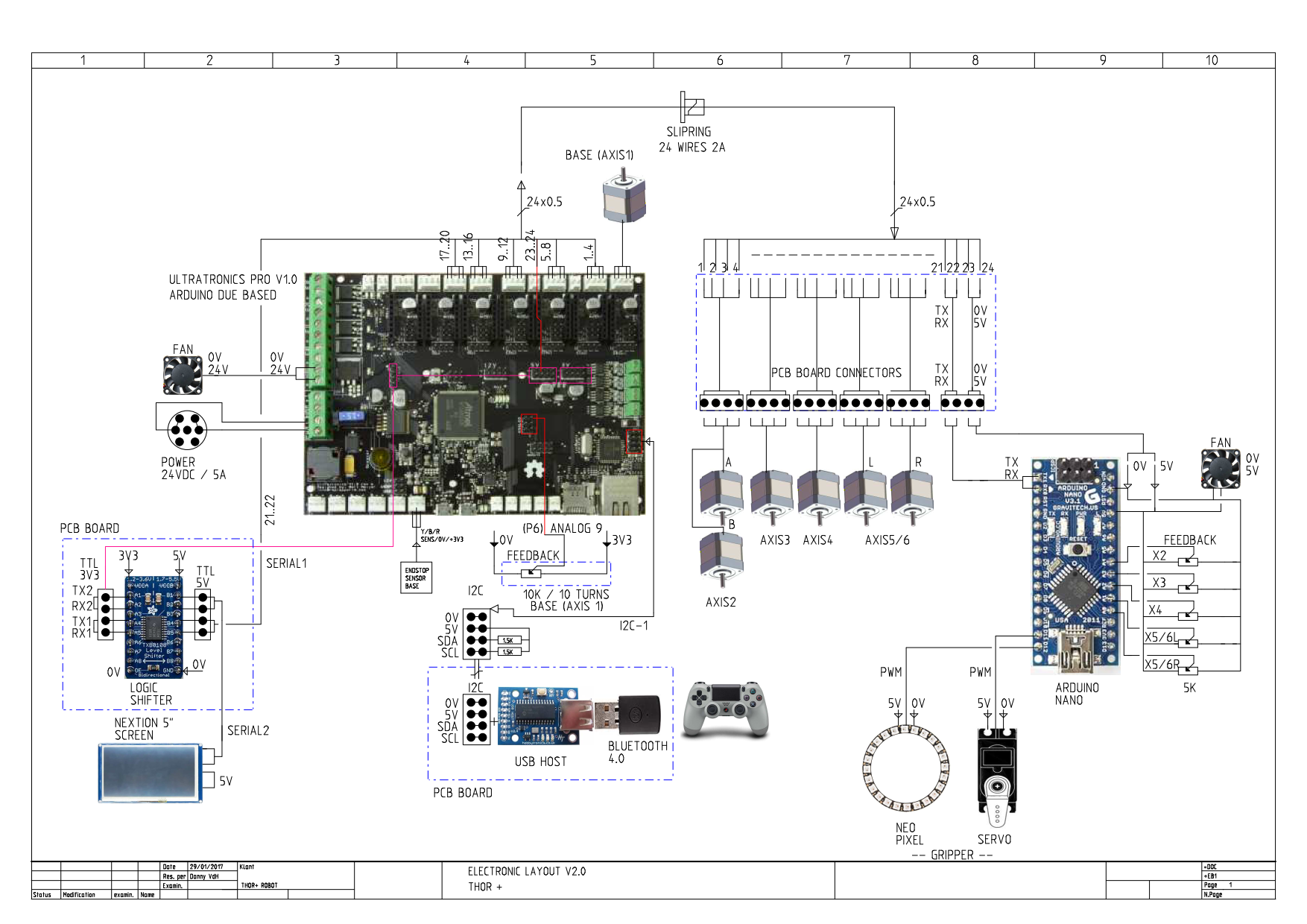
Aansturing van de robot arm
Het lastigste gedeelteKortom, mechanisch is het geheel bijna klaar. Maar voor mijn gevoel gaat de "ellende" nu pas echt beginnen
www.frees-it.com
:strip_exif()/u/465421/tweakersgroter.gif?f=community)
:strip_exif()/u/417986/crop5896f71a13c18_cropped.gif?f=community)
:strip_exif()/u/54011/monster.gif?f=community)
{kind=link}