/u/60597/crop5e56eb57d66d4_cropped.png?f=community)
Wat info vooraf: 
Ja, ik knutsel al veel langer met elektronica.
Nee, dit is niet m'n eerste Arduino knutselproject.
Ja, ik weet dat er veel spreiding is in de eigenschappen van die (veel hergebruikte) Nokia displays.
De vraag is alleen echter, zou een nieuw/ander display soelaas bieden (duurt wel weer een paar weken voordat het binnen is). Of kan het iets anders zijn, waar ik nu wat aan kan doen, zonder nieuwe parts te hoeven bestellen?
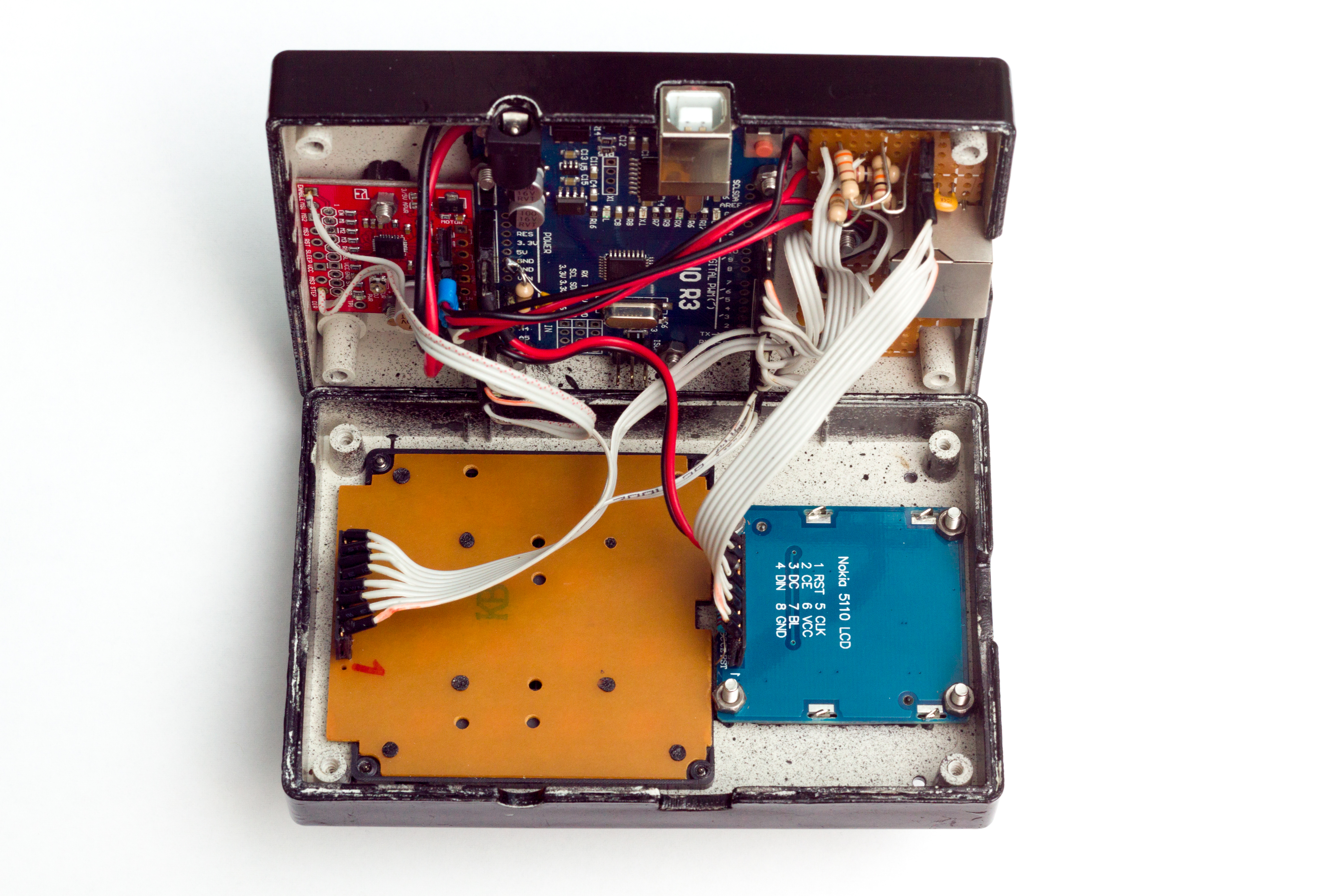
Begonnen met een compleet verse setup. Op basis van dat project van vorig jaar. Maar met een veel krachtigere stappenmotor en een veel grotere rail constructie.
Het 'probleem':
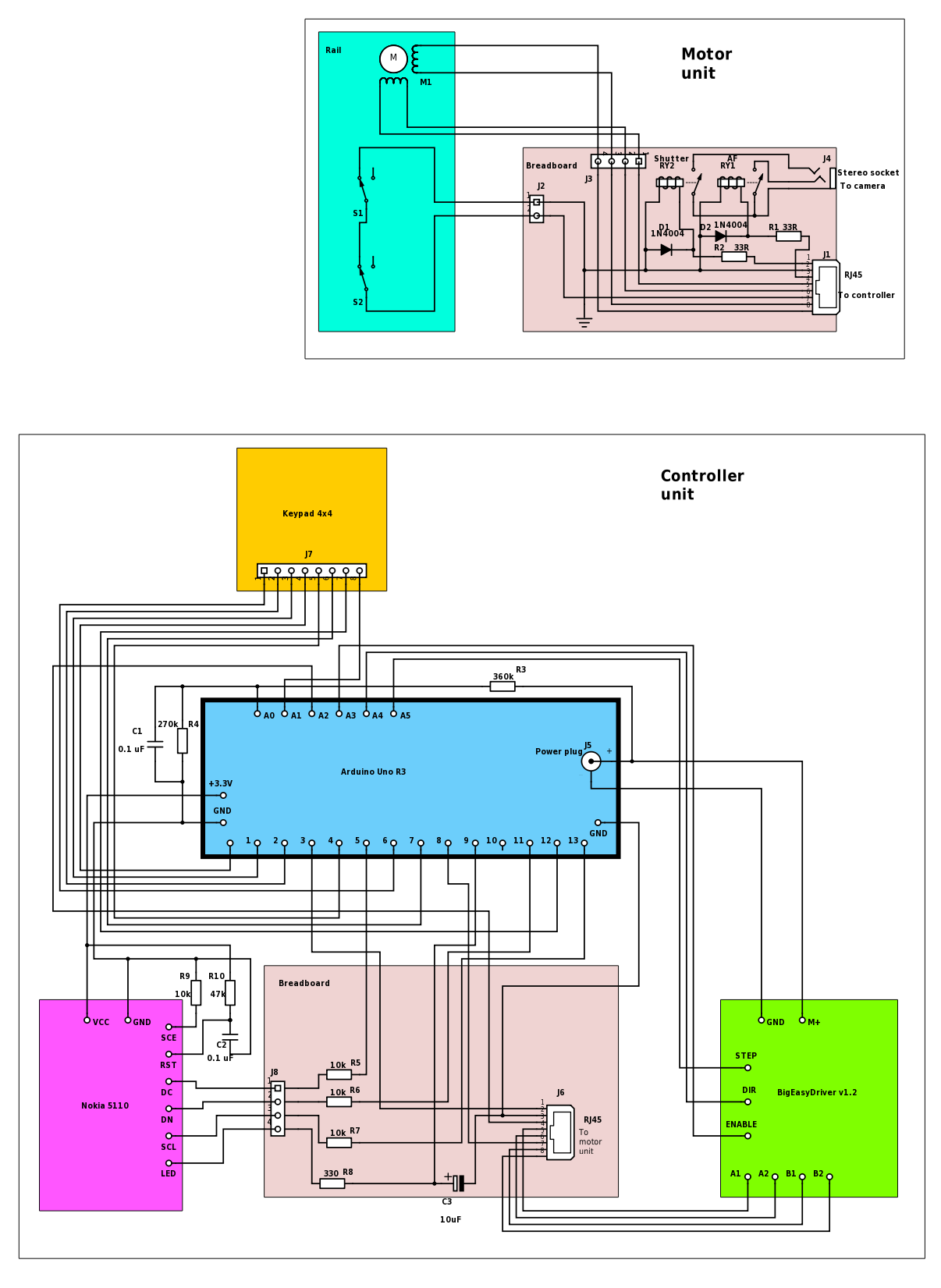
Nokia 5110 display wordt aangestuurd vanuit een Arduino.
afkomstig van dit project: http://pulsar124.wikia.com/wiki/Fast_Stacker
Nu heb ik vorig jaar eenzelfde soort setup gemaakt en toen moest ik ook wat fröbelen om het LCD correct en contrastrijk aan te sturen. Maar die tips stonden alhier: http://pulsar124.wikia.com/wiki/Troubleshooting#LCD_issues
Schema: https://farm9.staticflick...09756585_494d5d592e_o.png
Nu werkt dit echter niet goed. Of liever gezegd, da's nou juist het rare, af en toe wel, af en toe niet.
Ik voorzie het geheel van power, het display licht op met de juiste tekstuele informatie, en een paar seconden later (als de Arduino s/w compleet geïnitialiseerd is), scrambled de tekst weer op het display, of niet. Of het tekstblok wordt één donker geheel. Of niet Soms blijft het ook goed werken. Waarom wel/waarom niet?
Soms blijft het ook goed werken. Waarom wel/waarom niet?
Wat ik al geprobeerd heb:
Of dat ik toch een andere Nokia 5110 zal moeten bestellen?
Veelal kost het me een aantal power on cyclussen om beeld te krijgen en te behouden op het display. M.a.w. je zou denken dat het toch iets met de RST initialisatie heeft te maken. Maar wat doe ik dan fout?
Ja, ik knutsel al veel langer met elektronica.
Nee, dit is niet m'n eerste Arduino knutselproject.
Ja, ik weet dat er veel spreiding is in de eigenschappen van die (veel hergebruikte) Nokia displays.
De vraag is alleen echter, zou een nieuw/ander display soelaas bieden (duurt wel weer een paar weken voordat het binnen is). Of kan het iets anders zijn, waar ik nu wat aan kan doen, zonder nieuwe parts te hoeven bestellen?
Begonnen met een compleet verse setup. Op basis van dat project van vorig jaar. Maar met een veel krachtigere stappenmotor en een veel grotere rail constructie.
Het 'probleem':
Nokia 5110 display wordt aangestuurd vanuit een Arduino.
afkomstig van dit project: http://pulsar124.wikia.com/wiki/Fast_Stacker
Nu heb ik vorig jaar eenzelfde soort setup gemaakt en toen moest ik ook wat fröbelen om het LCD correct en contrastrijk aan te sturen. Maar die tips stonden alhier: http://pulsar124.wikia.com/wiki/Troubleshooting#LCD_issues
Schema: https://farm9.staticflick...09756585_494d5d592e_o.png
Nu werkt dit echter niet goed. Of liever gezegd, da's nou juist het rare, af en toe wel, af en toe niet.
Ik voorzie het geheel van power, het display licht op met de juiste tekstuele informatie, en een paar seconden later (als de Arduino s/w compleet geïnitialiseerd is), scrambled de tekst weer op het display, of niet. Of het tekstblok wordt één donker geheel. Of niet
Wat ik al geprobeerd heb:
- RC circuit wat aan de RST pin van de Nokia module hangt, aangepast. de 100nF condensator verdubbelt in capaciteit. Zelfs een 10uF elco er over heen gezet; geen succes.
- Extra 10uF elco tussen Vcc en GND van de Nokia; geen succes
- Extra 10uF elco tussen LED en GND van de Nokia; geen succes.
- SPI frequency in stacker.ino module aangepast "SPI.setClockDivider(SPI_CLOCK_DIV16);" (zowel DIV16 als DIV8 geprobeerd; geen succes.
- Software SPI gebruikt ipv hardware SPI; dat was in ieder geval nodig, anders kreeg ik helemaal geen beeld.
- Al dan niet background LED aansturing achterwege gelaten (LED op Nokia module); maakt geen verschil
- Getest met verschillende contrastinstellingen "command(PCD8544_VOP | 0x47);" in pcd8544.cpp library; dit heeft wel effect op het contrast, maar lost niet het genoemde probleem op.
Of dat ik toch een andere Nokia 5110 zal moeten bestellen?
Veelal kost het me een aantal power on cyclussen om beeld te krijgen en te behouden op het display. M.a.w. je zou denken dat het toch iets met de RST initialisatie heeft te maken. Maar wat doe ik dan fout?
[ Voor 11% gewijzigd door ehtweak op 01-12-2016 13:07 ]
/u/26191/AC-60px.png?f=community)



:strip_icc():strip_exif()/u/378363/crop57442ba3ce8ed_cropped.jpeg?f=community)
{kind=link}
{kind=link}