loudwig schreef op woensdag 17 december 2014 @ 22:01:
[...]
Ik bedoel dat die 30kW die je berekend hebt niet relevant is. Megamind vraagt naar de energie die verstookt zou moeten worden en jij geeft het maximale vermogen welke de regelaar aan de motor zou kunnen leveren. Dat is niet hetzelfde. De energie die verstookt zou moeten worden is afhankelijk van het toerental van je werktuig en zijn massatraagheid. Als je heel lang 30kW in het werktuig stopt kan je je voorstellen dat de energie ontzettend groot kan worden. Ook is van belang hoe lang de remming zou mogen duren.
Ik begrijp nog niet goed in hoeverre de regelaar zelf te beïnvloeden is. Wat bouwen jullie nou zelf? De hardware/software/compleet apparaat of stellen jullie de parameters van een drive in?
Met type motor bedoel ik geen serienummers, maar een asynchrone motor, synchrone motor of een gelijkstroommotor (of nog iets anders). Weet je welk type wordt toegepast?
De oplossing die je voorstelt snap ik niet helemaal, maar dat komt omdat ik het type motor niet weet en daardoor ook geen voorstelling van de schakeling kan maken. Ik ga er nu van uit dat je een buck converter hebt, maar dat is maar een gok.
Blijkbaar heb je wel een (vermogens)weerstand liggen, de beste optie om een ED-rem te realiseren. Als je weet welk type motor er toegepast wordt, is te zeggen hoe die weerstand toegepast zou moeten worden.
we gebruiken zowel asynchrone als synchrone als pmac en gelijkstroom regelingen,
het klopt wij sttelen van de regeling zelf alleen maar de parameters in.
mocht er vraag zijn naar een joystick over CanOpen, of een stuk complexer een board computer met 4 stuurregelingen met autopilot , flybridge stuur bridge stuur enzevoorts dan maken, designen (over algemeen mijn taak) daar een printplaat voor( als board computer).
voor de rest instaleren wij regelingen in voertuigen als boten en auto's . deze regelingen moeten worden gematchet op de electro motor om zo maximal performance te realiseren.
dit doen wij op een testbank waar we de motor afremmen met een remMotor waar het veld geregeld wordt door een variabele spanning. en de rotor is kortgesloten over een weerstand.
met andere woorden het ciruit moet dus breed inzetbaar zijn om het overtollige rem vermogen te dumpen.
de ene motor staat indd sneller stil dan de andere motor. dus binnen die range moet het circuit kunnen werken.
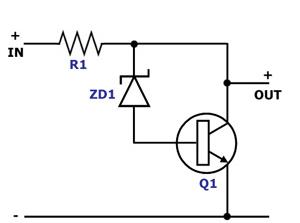
dit is het id
http://electronic-projects.50webs.com/image/76.jpg
r1 wordt dan de weerstand van een diode, die naar de afvlakking komt van de transformator.
onder q1 komt een weerstand die maximaal de stroom kan doorgeven die door de mosfetts velig geschakeld kan worden.
en als laatse voor de regeling een afvlakking, van een condensator en weerstand in serie, (zodat de condensator voor afvlakking maximaal 50AMP kan ontladen)
q1 wordt dan een array, van parallel geschakelde mosffets, (ongeveer 50 stuks 120AMp rated) met een zo'n laag mogelijke RDSon en saturated gate voltage .
voor q1 denk ik dan aan 120V
( als vermogens weerstand gebruiken wij parallel geschakelde warmte elementen. deze zijn goedkoop, en kunnen flink wat vermogen aan, dit is ook de dump weerstand die al bijna een jaar in bedrijf is gesteld onder onze testbank)
:strip_icc():strip_exif()/u/146731/crop562615a0aa64c.jpeg?f=community)
/u/61403/crop58bff192a74cb_cropped.png?f=community)
:strip_icc():strip_exif()/u/225583/crop5db1b1fd1ec4a_cropped.jpeg?f=community)
{kind=link}